Безопасная гастро- и колоноскопия: доступно ли это в Уссурийске?
Кабинет. Фото: Вероника Мурватова, ИА UssurMedia
Современные методы диагностики и лечения становятся все более инвазивными – позволяющими врачам внедряться в человеческий организм. Такие манипуляции проявили себя как более эффективные. А любая инвазивная процедура сопряжена с риском инфицирования. Именно поэтому каждому пациенту необходимо быть абсолютно уверенным в качественной дезинфекции медицинских инструментов и оборудования.
Корр. ИА UssurMedia встретился с главной медицинской сестрой клиники George Татьяной Кашенцевой, которая рассказала о передовой технологии дезинфекции оборудования для гастро— и колоноскопии. Оказывается, немногие клиники могут позволить себе обрабатывать аппараты после эндоскопических исследований согласно последним рекомендациям, призванным улучшить инфекционную безопасность, поэтому проблема обеспечения качественной дезинфекции эндоскопов и снижения рисков инфицирования пациентов остается крайне актуальной.
— Татьяна Александровна, гастро— и колоноскопия остаются на протяжении многих лет одними из самых востребованных медицинских процедур. Но почему о важности качественной дезинфекции оборудования заговорили именно сейчас?
— По мере внедрения инвазивных методов диагностики и лечения во врачебную практику качественная обработка инструментария становится всё более важной. Благодаря дезинфекции и стерилизации обеспечивается инфекционная безопасность инвазивных медицинских процедур. Ученые доказали, что при некачественной обработке эндоскопов пациенты могут заразиться инфекциями, передающимися через кровь, например, гепатитом, ВИЧ, или заполучить бактерии хеликобактер пилори, которых ранее у человека не было. Но люди, пришедшие на процедуру, зачастую не знают про эту скрытую угрозу.
— Но ведь все равно эндоскопы проходят какую-то обработку?
— До сих пор во многих клиниках дезинфекция эндоскопов проводится только ручным способом. После процедуры эндоскоп помещается сначала в емкость с моющим раствором, затем – дезсредством, где его промывает медсестра. Но качественное ручное очищение эндоскопа – это очень трудоёмкий процесс, требующий от медсестры высочайшей квалификации и ответственности. Эндоскоп – сложное устройство, качественно обработать его может только специально подготовленный персонал. Диаметр внутреннего канала эндоскопа составляет менее 3 мм, а длина – больше метра, поэтому в труднодоступных местах могут оставаться следы биологического материала. Но даже при соблюдении всех требований, которые действующие нормативные документы предъявляют к дезинфекции эндоскопов, при их ручной обработке нельзя исключить человеческий фактор…
Но качественное ручное очищение эндоскопа – это очень трудоёмкий процесс, требующий от медсестры высочайшей квалификации и ответственности. Эндоскоп – сложное устройство, качественно обработать его может только специально подготовленный персонал. Диаметр внутреннего канала эндоскопа составляет менее 3 мм, а длина – больше метра, поэтому в труднодоступных местах могут оставаться следы биологического материала. Но даже при соблюдении всех требований, которые действующие нормативные документы предъявляют к дезинфекции эндоскопов, при их ручной обработке нельзя исключить человеческий фактор…
Учитывая эти риски, мы серьезно готовились к началу проведения эндоскопических процедур в нашем медицинском центре. Во-первых, было приобретено новое оборудование германского и американского производства. Во-вторых, для персонала были проведены обучающие тренинги по обработке эндоскопов.
Обучение проходило как на базе нашего медцентра, так и на специальном семинаре в г.Казань. В Казани была очень насыщенная программа обучения, ведущие специалисты рассказывали нам о многих малоизвестных, но важных аспектах качественной обработки эндоскопов. Все эти новые знания мы закрепили и отработали в тренинговом центре. Поэтому в медицинском центре George со дня открытия эндоскопического кабинета и по настоящее время подготовка эндоскопов к процедурам проводится по самому современному протоколу, включающему ручной и машинный этапы. Машинная обработка эндоскопов проходит в специальном моющем и дезинфицирующем аппарате – репроцессоре.
Все эти новые знания мы закрепили и отработали в тренинговом центре. Поэтому в медицинском центре George со дня открытия эндоскопического кабинета и по настоящее время подготовка эндоскопов к процедурам проводится по самому современному протоколу, включающему ручной и машинный этапы. Машинная обработка эндоскопов проходит в специальном моющем и дезинфицирующем аппарате – репроцессоре.
Репроцессор. Фото: Вероника Мурватова, ИА UssurMedia
Камера репроцессора. Фото: Вероника Мурватова, ИА UssurMedia
— Как проходит дезинфекция в репроцессоре?
— В нашей клинике имеется отдельное помещение, в котором проводится дезинфекция эндоскопического оборудования. Медицинская сестра принимает эндоскоп после процедуры, проводит предварительную и окончательную очистку в моющем средстве, тест на герметичность. погружает его в раствор моющего средства и проверяет на целостность. Затем каналы эндоскопа продувают воздухом, чтобы ушла лишняя влага. После этого эндоскоп помещают в репроцессор, где моющим и дезинфицирующим средствами производится второй этап очищения. Обработка эндоскопа в репроцессоре контролируется электроникой: подача моющего и дезинфицирующего средств, их объем, поступление в каналы эндоскопа и экспозиция, первичное осушение каналов спиртом. Кстати, очищение и дезинфекция эндоскопа – это затратный по времени процесс, который занимает не менее 40 минут. А завершающий, но немаловажный этап подготовки эндоскопов – это сушка и хранение оборудования между процедурами.
Обработка эндоскопа в репроцессоре контролируется электроникой: подача моющего и дезинфицирующего средств, их объем, поступление в каналы эндоскопа и экспозиция, первичное осушение каналов спиртом. Кстати, очищение и дезинфекция эндоскопа – это затратный по времени процесс, который занимает не менее 40 минут. А завершающий, но немаловажный этап подготовки эндоскопов – это сушка и хранение оборудования между процедурами.
Специалист проверяет данные о сушке и хранении эндоскопов. Фото: Вероника Мурватова, ИА UssurMedia
Мы помещаем эндоскопы в герметичный шкаф для сушки. Каждый эндоскоп закрепляется в вертикальном положении, каналы эндоскопов продуваются подогретым очищенным воздухом. Это исключает возможность скопления остатков влаги и образования микробной биопленки внутри каналов. В последующем, в процессе хранения, в шкафу также поддерживается необходимая температура и повышенное давление. Электронная «начинка» шкафа контролирует и фиксирует все этапы сушки и хранения эндоскопов, своевременно напоминает персоналу об окончании срока хранения и необходимости повторной обработки.![]()
Пистолет для продувки эндоскопов сжатым воздухом. Фото: Вероника Мурватова, ИА UssurMedia
Раковина для ручного этапа обработки эндоскопов. Фото: Вероника Мурватова, ИА UssurMedia
Сушка и хранение эндоскопов в шкафу. Фото: Вероника Мурватова, ИА UssurMedia
— Довольно сложные процессы, которые отнимают много времени и ресурсов. Наверняка это влияет на ценообразование?
— Да, стоимость гастро— и колоноскопии в нашем медцентре выше, чем в других клиниках Уссурийска. Это прямое следствие высоких затрат на дезинфекцию эндоскопов. Но медицинский центр George в первую очередь заботится о безопасности своих пациентов.
Медицинский центр George в Уссурийске находится по адресу: ул. Маяковского, 100
Тел.: 35-87-35
Лицензия на осуществление медицинской деятельности №ЛО-25-01-004157, выдана 20.07.2017 (срок действия — бессрочно) Департаментом здравоохранения Приморского края
v. Фото: UssurMedia
Фото: UssurMedia
Набор USB-видеосистемы Pentax для работы с фиброэндоскопами
Набор USB-видеосистемы Pentax — портативная камера для захвата изображения с окуляра фиброэндоскопа, цифровой обработки и ведения базы данных пациентов с архивом эндоскопических изображений и заключений.
Данная портативная система позволяет проводить исследования в любом месте подключив камеру к компьютеру у постели больного, и даже на дому у пациента.Система включает в себя светодиодный источник света, видеокамеру, подключаемую напрямую к USB-порту компьютера или ноутбука, и программное обеспечение для компьютерной обработки полученных снимков.
Характеристики видеокамеры
За счет полностью программной обработки изображения без отдельного аппаратного блока достигается невысокая стоимость всей системы, что позволяет даже небольшой клинике освоить новые цифровые возможности современной эндоскопической техники.![]()
| Сенсор | CCD 1/4” высокочувствительный |
| Разрешение матрицы | (752 x 582) PAL |
| Вес | 210 грамм |
| Длина кабеля | 3 м |
| Дополнительные возможности | Электронный анти-муаровый фильтр, 2 программируемые кнопки на головке камеры (баланс белого и захват изображения), выход USB 2.0, автоматическая настройка баланса белого и гаммы |
Светодиодный источник света
Яркий светодиодный источник света дает равномерное и яркое холодное освещение рабочего поля. При этом встроенная LED-лампа имеет большой ресурс работы и не требует постоянной замены.
| Размеры | 180 x 95 x 35 |
| Вес | 320 грамм |
| Тип лампы | Светодиодная |
| Мощность | 30 Вт LED (интенсивность светового потока эквивалентна 100 Вт Ксенон) |
| Цветовая температура | 4500° K |
| Ресурс работы лампы | 50000 часов |
| Регулировка яркости | Ручное управление |
| Дополнительные возможности | Защитная система с датчиком наличия световода; Автоматическая система защиты от перегрева; Электронная диафрагма; Режим ожидания с памятью уровня освещенности. |
Программное обеспечение
- анти-муаровый фильтр убирает сетчатость изображения при работе с фиброэндоскопами;
- возможна работа как с фиброскопами, так и с жесткими эндоскопами;
- встроенный графический редактор позволяет делать пометки на изображении и сохранять их;
- запись фото и видео-изображений;
- ведение базы данных пациентов с набором эндоскопических снимков и комментариев к каждому изображению;
- распечатка отчетов на бланке с указанием лечебного учреждения, лечащего врача и итогового заключения по результатам исследования.
Новости Рекомендуемые препараты для уничтожения бытовых и обитающих в открытой природе насекомых 10.
Инсектицидное средство СУПЕРСИЛА
ХОТИТЕ ЗНАТЬ О МЕДИЛИСЕ ВСЕ? ВАМ СЮДА 23.05/2016 Как избавиться от клопов? Поможет новый препарат Медилис-антиклоп 06.11/2013 СРЕДСТВА ОТ КЛОПОВ: 1. «Медилис-антиКЛОП» (видеоролик) ВНИМАНИЕ — НОВЫЕ ПРЕПАРАТЫ! 28. ООО «Профилактика» предлагает новые препараты, для дезинфекции и стерилизации изделий медицинского назначения Добавлена ссылка на видео-инструкцию по обработке дачных участков от клещей с помощью Медилис ципер 25.08/2013 Спецпредложения |
|
 02/2018
02/2018 10/2013
10/2013

 Обладает активностью против всех видов микроорганизмов (включая особо опасные — чуму, холеру, сибирскую язву, возбудители анаэробных инфекций, патогенные грибы в т.ч. плесневые). Используется многократно (в течение 14 дней). Применяется для дезинфекции высокого уровня (ДВУ) эндоскопов и инструментов к ним; для дезинфекции и предстерилизационной обработки инструментов (в т.ч. совмещённая) ручным и ультразвуковым способом; для обеззараживания систем вентиляции и кондиционирования воздуха в ЛПУ; для проведения обработок аппаратов, оборудования, включая кювезы и блоки ингаляционного наркоза и искусственной вентиляции лёгких; для дезинфекции лабораторной посуды; предметов ухода за больными; для проведения генеральных уборок и утилизации отходов.
Обладает активностью против всех видов микроорганизмов (включая особо опасные — чуму, холеру, сибирскую язву, возбудители анаэробных инфекций, патогенные грибы в т.ч. плесневые). Используется многократно (в течение 14 дней). Применяется для дезинфекции высокого уровня (ДВУ) эндоскопов и инструментов к ним; для дезинфекции и предстерилизационной обработки инструментов (в т.ч. совмещённая) ручным и ультразвуковым способом; для обеззараживания систем вентиляции и кондиционирования воздуха в ЛПУ; для проведения обработок аппаратов, оборудования, включая кювезы и блоки ингаляционного наркоза и искусственной вентиляции лёгких; для дезинфекции лабораторной посуды; предметов ухода за больными; для проведения генеральных уборок и утилизации отходов. Полученный рабочий раствор содержит надуксусную кислоту (не менее 0,2%) и пероксид водорода (2,7- 3,3%). Образующаяся смесь обладает очень выраженной антимикробной активностью, в том числе спороцидными свойствами, (тестирована на споровой культуре штаммов Bacillus Subtilis, Bacillus cereus). Раствор не обладает фиксирующим действием, не портит обрабатываемые изделия, не обладает коррозионной активностью. Мироксид-2000 применяется в ЛПУ любого профиля, включая детские отделения и отделения неонатологии для:
Полученный рабочий раствор содержит надуксусную кислоту (не менее 0,2%) и пероксид водорода (2,7- 3,3%). Образующаяся смесь обладает очень выраженной антимикробной активностью, в том числе спороцидными свойствами, (тестирована на споровой культуре штаммов Bacillus Subtilis, Bacillus cereus). Раствор не обладает фиксирующим действием, не портит обрабатываемые изделия, не обладает коррозионной активностью. Мироксид-2000 применяется в ЛПУ любого профиля, включая детские отделения и отделения неонатологии для:


Центр Экспертной Эндоскопии, г. Симферополь, Алексей Корнеев
Колоноскопия
Колоноскопия — осмотр поверхности слизистой оболочки прямой и толстой кишки с помощью специального инструмента – колоноскопа, вводимого через задний проход.![]() Длительность около 30 минут. Колоноскоп отличается от гастроскопа длиной и диаметром.
Длительность около 30 минут. Колоноскоп отличается от гастроскопа длиной и диаметром.
С анестезией или без?
В большинстве случаев, технически правильно выполняемая колоноскопия не вызывает болевых ощущений и не требует общего обезболивания. Для пациентов, желающих выполнить колоноскопию в состоянии медикаментозного сна, мы предлагаем внутривенную седацию, как наиболее безопасный и комфортный способ. Применение нами углекислого газа вместо воздуха минимизирует дискомфорт поле исследования.
Аппаратура
В нашей клинике используется новейшая эндоскопическая аппаратура высшего мирового уровня (OLYMPUS™ EVIS EXERA III — Япония) с уникальными колоноскопами, снабженными оптическим увеличением x85 (технология DualFocus®), технологией NBI®, позволяющими сразу определять ранний рак и предраки по изменению капилляров и микрорельефа.
Нужна ли Вам колоноскопия?
Показания к колоноскопии определяются лечащим врачом. Колоноскопия является «золотым стандартом» в диагностике рака и предраковых изменений толстой кишки.
Согласно имеющихся рекомендаций по скринингу колоректального рака, колоноскопия обязательно должна выполняться всем без исключения пациентам с положительным результатом анализа кала на скрытую кровь (FIT, iFOBT, FOB-Gold) [2], а также, всем лицам в общей популяции, начиная с 45 лет 1 раз в 10 лет (сигмоидоскопия и КТ-колонография — 1 раз в 5 лет) [3].
Необходимость профилактики связана с тем, что рак кишки зачастую протекает бессимптомно до 3-4 стадии.
При обнаружении предраковых полипов – возможно их одновременное удаление, при условии предварительного согласования с врачом-эндоскопистом и отсутствии противопоказаний.
[2] согласно рекомендаций ASGE (Американское Общество Гастроинтестнальных Эндоскопистов) — ESGE (Европейское Общество Гастроинтестнальных Эндоскопистов), JGES (Японское Гастроэнтерологическое Эндоскопическое Общество), РоЭндО (Российское эндоскопическое общество)
ИМЕЮТСЯ ПРОТИВОПОКАЗАНИЯ. НЕОБХОДИМА КОНСУЛЬТАЦИЯ СПЕЦИАЛИСТА
Инфекционная безопасность диагностических и оперативных вмешательств при патологии ЖКТ
1. Государственное бюджетное профессиональное образовательное учреждение Департамента здравоохранения города Москвы «Медицинский колледж
Государственное бюджетноепрофессиональное образовательное
учреждение Департамента здравоохранения
города Москвы «Медицинский колледж № 7»
Филиал «Тимирязевский».
ПРЕЗЕНТАЦИЯ НА ТЕМУ:
«ИНФЕКЦИОННАЯ БЕЗОПАСНОСТЬ
ДИАГНОСТИЧЕСКИХ И ОПЕРАТИВНЫХ
ВМЕШАТЕЛЬСТВ ПРИ ПАТОЛОГИИ ЖКТ»
2.
 Оглавление. 1.
Оглавление. 1.2.
3.
4.
5.
6.
7.
Требования к помещениям, предназначенным для
проведения стерильных эндоскопических
вмешательств, обработки эндоскопов и их хранения.
Инфекционная безопасность.
Средства индивидуальной защиты.
Зоны обработки эндоскопов. Грязная зона и чистая
зона.
Предварительная очистка эндоскопов.
Окончательная очистка.
Дезинфекция высокого уровня.
3. Эндоскопическое отделение должно иметь следующие помещения:
Кабинеты врачей;Раздельные эндоскопические манипуляционные;
Моечно-дезинфекционное помещение;
Вспомогательные помещения.
При манипуляционной для проведения исследований
нижних отделов пищеварительного тракта
предусматривается наличие санитарного узла.
Помещение, в котором проводятся эндоскопические
вмешательства, должно быть оборудовано раковиной
для мытья рук медицинских работников.
Предварительная очистка использованных эндоскопов и
инструментов к ним выполняется в том же помещении, где
проводилось вмешательство.

Окончательная очистка и дезинфекция эндоскопов, проводятся в
специально оборудованном моечно-дезинфекционном помещении.
Помещение для обработки эндоскопов оборудуется приточно-
вытяжной вентиляцией с удалением паров растворов на уровне
моечных ванн.
Расположение технологического оборудования в помещении для
обработки эндоскопов должно обеспечивать поточность
выполнения всех этапов обработки эндоскопов в соответствии с
требованиями настоящих санитарных правил.
Помещение для обработки эндоскопов функционально
разделяется на условно грязную зону, предназначенную для
проведения окончательной очистки, и условно чистую зону,
где проводится дезинфекция высокого уровня, сушка и
хранение эндоскопов.
Во вновь проектируемых медицинских организациях
предусматриваются планировочные решения, исключающие
перекрест потоков чистых и грязных эндоскопов.
В помещении для обработки эндоскопов устанавливается
раковина для мытья рук медицинского персонала.
.jpg) Не
Недопускается использовать её для других целей.
6. Зона окончательной очистки эндоскопов должна оборудоваться:
Столом для контейнеров с использованнымиэндоскопами;
Моечными ваннами емкостью не менее 10
литров, подключенными к канализации и
водоснабжению; количество моечных ванн
определяется исходя из максимальной рабочей
нагрузки в эндоскопическом отделении;
Стеллажами (шкафами) для хранения
нестерильных расходных материалов (простыни,
пеленки, перчатки, салфетки, моющие и
дезинфицирующие средства).
7. Зона ДВУ и хранения эндоскопов должна оборудоваться и оснащаться:
Емкостью для проведения ДВУ в растворе химическогосредства объемом не менее 10 литров;
Моечными ваннами для удаления остатков средства
ДВУ;
Емкостями для ополаскивания бронхоскопов;
Столами для сушки и упаковки обработанных
эндоскопов;
Шкафами для сушки и хранения эндоскопов в
асептической среде;
Стеллажами (шкафами) для хранения стерильных
материалов (простыни, пеленки, перчатки, чехлы для
эндоскопов).

• Все виды шкафов для хранения обработанных эндоскопов
подлежат очистке и дезинфекции раствором химического средства
в бактерицидном режиме не реже 1 раза в неделю.
• Уборка и профилактическая дезинфекция в манипуляционных для
нестерильных эндоскопических вмешательств и в моечнодезинфекционном помещении должны проводиться по мере
загрязнения, но не реже одного раза в смену или 2 раз в день.
После каждого пациента поверхность кушетки (стола) для
исследований, с которой он контактировал, должна подвергаться
дезинфекции.
Генеральная уборка должна проводиться 1 раз в неделю.
9. Общие положения по помещениям, где проводятся эндоскопические исследования.
Стерильные эндоскопические вмешательства должныпроводиться в операционных, малых операционных
медицинских организаций или в эндоскопических
манипуляционных профильных хирургических отделений.
Предварительная очистка эндоскопического оборудования
после завершения оперативного вмешательства должна
осуществляться в зоне, в которой проводится
предварительная очистка хирургического инструментария.

Предварительная очистка гибких эндоскопов и инструментов
к ним должна проводиться сразу после завершения
вмешательства в эндоскопической манипуляционной.
Предстерилизационная очистка, совмещенная с
дезинфекцией, эндоскопов для стерильных манипуляций и
инструментов должна проводиться в помещении разборки и
мытья инструментов операционного блока, в моечнодезинфекционном помещении хирургического отделения, в
ЦСО.
Эндоскопы и инструменты, подвергнутые стерилизации,
должны храниться в асептических условиях.
Уборка и дезинфекция в помещениях, где осуществляются
стерильные эндоскопические вмешательства, должна
проводиться после каждого вмешательства. Генеральная
уборка — 1 раз в неделю.
Между рабочими сменами эндоскоп должен храниться в разобранном
виде, упакованным в стерильный материал или неупакованным в шкафу
для сушки и хранения эндоскопов в асептической среде.
Срок хранения эндоскопов в шкафу для сушки и хранения в
асептической среде указывается в инструкции по эксплуатации шкафа.

Срок хранения эндоскопов, упакованных в стерильные тканевые чехлы,
не должен превышать 72 часа. После истечения указанного срока
хранения эндоскоп подлежит ДВУ повторно.
Не допускается хранение эндоскопов в шкафах под действием прямых
ультрафиолетовых лучей
Срок хранения простерилизованных эндоскопов и инструментов к ним
определяется выбранным методом стерилизации, видом и сроком
годности упаковочного материала.
12. Инфекционная безопасность.
Поскольку в отделении очень большой потокпациентов, в том числе, с ВИЧ инфекцией,
гепатитом и туберкулезом, медицинскому
персоналу так же необходимо соблюдать свою
личную безопасность, для предупреждения
инфицирования.
Но ,все же, инфекционная безопасность
включает защиту как медицинского
персонала, так и пациента.
13. Использование средств индивидуальной защиты.
Для собственной защиты медицинский персоналиспользует :
Перчатки
Маска/респиратор
Шапочка
Щитки
Медицинский халат или костюм
14.
 Зоны обработки эндоскопов. Функционально помещение для обработки делят
Зоны обработки эндоскопов. Функционально помещение для обработки делятна «грязную зону», куда после использования и
предварительной очистки поступают эндоскопы
и инструменты к ним и «чистую зону», в которой
проводятся завершающие этапы обработки ДВУ/стерилизация, отмывка, сушка и хранение в
асептических условиях.
15. Грязная зона.
Предназначена для проведения окончательнойили предстерилизационной очистки эндоскопов
и инструментов к ним. На этом этапе персонал
контактирует с инфицированным материалом,
поэтому должен строго соблюдать меры
индивидуальной защиты. Оператор перед
приемом эндоскопа и инструментов к нему
одевает халат, непромокаемый фартук, маску,
очки и шапочку. Руки должны быть защищены
перчатками, желательно армированными, чтобы
исключить возможность прокола или пореза о
колюще-режущие инструменты.
16. Чистая зона.
В «чистой зоне», где проводится ручная обработкаэндоскопов, расположены: раковина для забора воды
для приготовления
дезинфицирующих/стерилизующих растворов и
отмывки эндоскопов для желудочно-кишечного
тракта, слива воды после отмывки; емкости для
ДВУ/стерилизации и отмыва эндоскопов;
стерилизационные коробки со стерильными
халатами, простынями, перчатками и салфетками.

Отдельное место отводят для сушки эндоскопов и
инструментов к ним после проведения ДВУ или
стерилизации. Оно должно быть покрыто стерильной
клеенкой и стерильной простынею.
17. Предварительная очистка эндоскопов.
Проводится в процедурной сразу послезавершения эндоскопической манипуляции и
предназначена для удаления основных
загрязнений с поверхности и каналов
эндоскопа.
1.
2.
3.
4.
5.
6.
Сразу после процедуры в течение нескольких секунд провести
аспирацию воздуха.
Протереть рабочую часть эндоскопа от проксимального к
дистальному концу салфеткой, смоченной в растворе моющего
средства. Опустить дистальный конец эндоскопа в контейнер с
р-ром моющего средства и попеременно аспирировать раствор и
воздух через инструментальный (200-250 мл раствора).
Завершить процедуру аспирацией воздуха.
Промыть и продуть воздушный и водный каналы эндоскопа.
Промыть дополнительные каналы эндоскопа.

Отсоединить эндоскоп от осветителя, аспирирующего отсоса.
Переместить эндоскоп в упакованном виде (простынь, закрытый
контейнер, лоток) в моечно–дезинфекционное помещение.
19. Ошибки при проведении предварительной очистки.
Проводится быстро, без соблюдения протокола;Каналы воздух-вода и инструментальный не
прокачиваются в достаточном объеме моющим
раствором;
Контейнер для промывки не меняется (не
обрабатывается) после каждого пациента.
20. Тест на герметичность.
позволяет определить внешние и внутренниеповреждения эндоскопа до его погружения в
растворы химических средств, во избежание
серьезных повреждений при контакте с ними.
1.
2.
3.
4.
5.
Снять все клапана и другие детали, если это указано в
инструкции производителя.
Подключить тестер к устройству подачи воздуха и убедиться в
его поступлении.
Присоединить тестер к эндоскопу и подать воздух для создания
избыточного давления в аппарате.

Полностью погрузить под воду эндоскоп. С помощью винтов
блока управления согнуть дистальную часть во всех
направлениях, наблюдая за наличием или отсутствием струйки
пузырьков воздуха. Длительное наличие «дорожки» из
пузырьков воздуха свидетельствует о нарушении герметичности
эндоскопа.
После завершения проверки на герметичность сбросить
давление (отключив подачу воздуха на тестер или открыв
клапан манометра), извлечь эндоскоп (коннектор эндоскопа с
подключенным тестером) из воды и через несколько секунд
отсоединить тестер
22. Ошибки при проведении теста на герметичность эндоскопа:
Отказ от его проведения;2. Тест проводится нерегулярно, а иногда только
после обработки эндоскопа;
3. Эндоскоп не погружается в воду полностью.
1.
23. Окончательная обработка.
Эндоскопы подвергают обработке по одному издвух вариантов, отличающихся завершающей
стадией: либо дезинфекцией высокого уровня
(далее — ДВУ), либо стерилизацией.
Соответствующий вариант обработки выбирают в
зависимости от типа проводимой
эндоскопической манипуляции (нестерильная
или стерильная).
Перед нестерильной эндоскопической
манипуляцией эндоскоп на завершающей стадии
обработки подлежит дезинфекции высокого
уровня с целью уничтожения патогенных и
условно-патогенных микроорганизмов. Весь
процесс обработки таких эндоскопов состоит из
последовательно выполняемых стадий
предварительной очистки, окончательной
очистки и ДВУ.
Перед стерильной эндоскопической манипуляцией, при
которой эндоскоп вводят в стерильные полости и/или
ткани организма пациента, эндоскоп на завершающей
стадии обработки подлежит стерилизации с целью
уничтожения микроорганизмов всех видов, находящихся
на всех стадиях развития (включая споровые формы).
26. Одноразовые эндоскопы.
Инструменты к эндоскопам, выпускаемые встерильном виде с пометкой «только для
однократного применения», не должны
подвергаться очистке и стерилизации в ЛПУ и
использоваться повторно.

27. Окончательная очистка.
Окончательную очистку эндоскопов (перед ДВУ)проводят в «грязной зоне» специально
отведенного помещения для обработки.
Предстерилизационную и окончательную
очистку эндоскопов и инструментов к ним
осуществляют ручным или механизированным
способом.
Если эндоскопы не подвергали дезинфекции
(при отсутствии показаний к ней), перед
предстерилизационной/окончательной очисткой
от гибких эндоскопов отсоединяют (после
осуществления предварительной очистки и
проверки на нарушение герметичности) все
съемные части и элементы (клапаны, заглушки)
замачивают в растворе средства, обеспечивая
контакт всех поверхностей с раствором, после
чего моют этим раствором с помощью
специальных или мягких зубных щеток.
29. Ручной способ очистки.
При очистке ручным способом эндоскопы и инструментык ним помещают и емкость со средством. Жесткие
эндоскопы помещают в разобранном виде.

Каждый инструмент большой длины к гибким
эндоскопам для удобства размещения в емкости
сворачивают кольцом, учитывая рекомендации
производителя.
Изделия полностью погружают в раствор; заполняют все
каналы раствором через адаптер для заполнения каналов
с помощью шприца, избегая образования воздушных
пробок.
Инструменты к эндоскопам, имеющие замковые части,
погружают раскрытыми, предварительно сделав ими в
растворе несколько рабочих движений для лучшего
проникновения смеси в область замка.
30. Ручной способ очистки. Видео.
31. Видеоролик.
При проведении очистки необходимо строгособлюдать концентрацию и температуру рабочих
растворов, время обработки на каждом из этапов,
а также указания по ограничению срока годности
и кратности использования рабочих растворов,
приведенные для этих изделий в инструкции по
применению конкретного средства.
33. Контроль рабочего раствора.
При первых признаках изменения внешнего видарабочего раствора, его необходимо сразу же
заменить, даже если не истек допустимый срок
его годности.

34. Механизированный способ обработки.
Обработка эндоскопов механизированнымспособом проводится в соответствии с
эксплуатационной документацией на
применяемое оборудование.
35. Дезинфекция высокого уровня.
Обработка определенных моделей эндоскоповпроводится при наличии адаптеров для
подключения основных каналов к оборудованию.
При отсутствии адаптера для подключения
дополнительного канала (для подачи воды, для
подачи , проводника элеватора) этот канал должен
обрабатываться вручную до начала цикла.
После завершения обработки эндоскоп подлежит
повторному использованию или хранению в
условиях, исключающих вторичную контаминацию.
В течение рабочей смены обработанный
эндоскоп в собранном и упакованном в
стерильный материал виде может храниться до
очередного использования не более 3-х часов.
Эндоскоп, не использованный в течение
указанного периода, повторно подвергается ДВУ.
Между рабочими сменами эндоскоп должен храниться
в разобранном виде, упакованным в стерильный
материал или неупакованным в шкафу для сушки и
хранения эндоскопов в асептической среде.

Срок хранения эндоскопов в шкафу для сушки и
хранения в асептической среде указывается в
инструкции по эксплуатации шкафа. Срок хранения
эндоскопов, упакованных в стерильные тканевые
чехлы, не должен превышать 72 часа. После
истечения указанного срока хранения эндоскоп
подлежит ДВУ повторно.
Не допускается хранение эндоскопов в шкафах под
действием прямых ультрафиолетовых лучей.
Ёмкость(контейнер, бачок) для воды,
предназначенной для очистки линз, крышка и
соединительные шланги к ней в конце рабочей
смены подлежат очистке, сушке и стерилизации.
Перед использованием ёмкость заполняется
стерильной водой.
Аспирационная банка в процессе работы
заполняется не более чем на 3/4 объема. После
каждого опорожнения она подлежит
дезинфекции способом погружения и очистке.
На каждый аспирационный отсос
предусматривается не менее двух банок.
СПАСИБО ЗА
ВНИМАНИЕ!
ООО Медтрейд — ⚡ДЕЗИНФЕКЦИЯ И ОБРАБОТКА ГИБКИХ ЭНДОСКОПОВ.
 ..
..⚡ДЕЗИНФЕКЦИЯ И ОБРАБОТКА ГИБКИХ ЭНДОСКОПОВ
В процессе работы эндоскопы находятся в жесткой среде, они контактируют со слизистыми оболочками человека и стерильными органами. В связи с этим дезинфекция и обработка эндоскопов проводится в обязательном порядке. Этот процесс более сложный, чем дезинфекция ультразвуковых датчиков.
Обработка эндоскопов регламентируется санитарными правилами 3.1.3263-15 «Профилактика инфекционных заболеваний при эндоскопических вмешательствах» и методическими указаниями 3.1.3420-17 «Обеспечение эпидемиологической безопасности нестерильных эндоскопических вмешательств на желудочно-кишечном тракте и дыхательных путях».
✅ Обработка гибких эндоскопов (последовательность пунктов должна соблюдаться):
1. Удалить видимые загрязнения с поверхности эндоскопа марлевой салфеткой, смоченной в растворе моющего дезинфицирующего раствора (ПСО), от рукояти управления к дистальному концу.
2. Погрузить дистальный конец эндоскопа в раствор, пропустить через аспирационный канал раствор несколько раз, используя аспиратор, продуть канал клапаном аспирации. Пропустить дистиллированную воду и воздух перекрытием клапана подачи воды\воздуха.
Пропустить дистиллированную воду и воздух перекрытием клапана подачи воды\воздуха.
3. Отсоединить и погрузить клапаны, съёмные детали в моющее дезсредство, промыть и прочистить малой щеткой. Отсоединить эндоскоп и визуально проверить вводимую часть на наличие заломов, сколов, трещин линз дистального конца. Надеть защитную крышку на разъем коннектора и провести сухой тест на герметичность: накачать течеискателем давление в эндоскопе до уровня, указанного в инструкции производителя эндоскопа, в течение 3 минут стрелка не должна опуститься (допустимо падение давления не более 1 деления в первые 30 секунд). При падении давления необходимо обратиться в техническую поддержку и следовать указаниям инженера.
4. При положительном результате теста перейти к «мокрому» тесту на герметичность: создать давление в аппарате до уровня, указанного в инструкции производителя эндоскопа, и погрузить в сосуд с водой питьевого качества, течеискатель оставить рядом с сосудом. НИКОГДА не соединяйте и не отсоединяйте течеискатель и защитную крышку под водой, это может привести к попаданию воды в эндоскоп и течеискатель. Удалить салфеткой пузыри воздуха с поверхности эндоскопа, удалить воздух из каналов шприцом, наполненным водой. Изгибая дистальный конец, наблюдать за появлением цепочек пузырей воздуха, либо отдельных пузырей из одного и того же участка эндоскопа. Если пузырьки появились – необходимо изъять аппарат из воды и связаться с технической поддержкой. При положительном результате теста — извлечь из воды эндоскоп и протереть сухой салфеткой, стравить давление рычагом\винтом до 40 мм.рт.ст. и отсоединить течеискатель от эндоскопа.
Удалить салфеткой пузыри воздуха с поверхности эндоскопа, удалить воздух из каналов шприцом, наполненным водой. Изгибая дистальный конец, наблюдать за появлением цепочек пузырей воздуха, либо отдельных пузырей из одного и того же участка эндоскопа. Если пузырьки появились – необходимо изъять аппарат из воды и связаться с технической поддержкой. При положительном результате теста — извлечь из воды эндоскоп и протереть сухой салфеткой, стравить давление рычагом\винтом до 40 мм.рт.ст. и отсоединить течеискатель от эндоскопа.
5. Подключить промывочный адаптер и заглушки, а затем погрузить эндоскоп в сосуд с раствором для ПСО. Очистить седла клапанов, клапаны и все съёмные детали, снять пузыри воздуха с поверхности эндоскопа и начать очистку щеткой с инструментальных каналов. Обработку щеткой продолжать, пока на ней не перестанут выявляться видимые частицы биологических загрязнений. После завершения очистки каналов присоединить ирригатор, промывочные трубки, через которые вновь промыть все каналы раствором моющего средства для удаления остатков загрязнений. Извлечь эндоскоп из раствора, промыть поверхность и каналы проточной водой питьевого качества, продуть каналы воздухом и просушить аппарат сухой салфеткой.
Извлечь эндоскоп из раствора, промыть поверхность и каналы проточной водой питьевого качества, продуть каналы воздухом и просушить аппарат сухой салфеткой.
6. Погрузить эндоскоп, клапаны и остальные съёмные детали в раствор дезинфектанта (ДВУ), согласно инструкциям производителя дезинфицирующего средства, салфеткой удалить пузыри воздуха с поверхности аппарата, наполнить с помощью ирригатора все каналы дезинфектантом. Удостовериться в соблюдении рекомендаций по времени контакта, температуре и концентрации.
7. Достать эндоскоп, клапаны и остальные съемные детали из раствора дезинфектанта, промыть эндоскоп и все каналы стерильной водой комнатной температуры. Закачать в каналы небольшое количество 70% спирта и продуть воздухом. Насухо протереть эндоскоп, клапаны и остальные съемные детали.
Обработка эндоскопов механизированным способом проводится в соответствии с эксплуатационной документацией на оборудование. Перед каждым циклом обработки эндоскопов проводится их окончательная очистка ручным способом (в том числе с использованием щеток для всех доступных каналов), если в инструкции к мойке нет других указаний.
☎ Консультации по вопросам медицинского оборудования: 8 (800) 550-39-27.
🔝 MEDTRADE — поставщик профессионального медицинского оборудования в России.
Обработка и дезинфекция гибких эндоскопов
Правильная обработка эндоскопов и эндоскопической техники является важным этапом их эксплуатации, одним из ключевых аспектов в профилактике инфекционных заболеваний, обеспечении безопасности пациентов и врачей эндоскопических отделений и центров.
Соблюдение алгоритма обработки и дезинфекции эндоскопа позволяет исключить их контаминацию, заражение пациентов, врачей-эндоскопистов и персонала, ответственного за очистку, дезинфекцию и стерилизацию. При формировании методики обработки эндоскопов стоит руководствоваться актуальной нормативной базой и рекомендациями производителей эндоскопов и эндоскопической техники, инструментов.
Если правила обработки нарушены, или на каком-либо из этапов обнаружена проблема, неисправность, любое отклонение от нормы, использование аппарата запрещено — необходимо немедленно обратиться в инженерную сервисную службу для диагностики и ремонта эндоскопа.
До устранения неисправности поврежденный эндоскоп опасен как для пациентов, так и для врачей, поскольку, в зависимости от характера повреждения может нанести травму пациенту при исследовании и / или стать источником заражения пациентов и персонала клиники.
Актуальная нормативно-правовая база обработки и дезинфекции в эндоскопии
- СП 3.1.3263-15 Профилактика инфекционных заболеваний при эндоскопических вмешательствах от 08.06.2015.
- МУ 3.5.1937-04 Очистка, дезинфекция и стерилизация эндоскопов и инструментов к ним. Методические указания от 18.05.2010.
- МУ 3.1.3420-17 — Обеспечение эпидемиологической безопасности нестерильных эндоскопических вмешательств на желудочно-кишечном тракте и дыхательных путях
- СанПиН 2.1.3.2630-10 Санитарно-эпидемиологические требования к организациям, осуществляющим медицинскую деятельность от 18.05.2010.
Свяжитесь с нами: ответим на любые вопросы по эндоскопическому оборудованию. Поможем проверить текущее состояние. Проведем совместную дистанционную диагностику. Или приедем для полноценной проверки на месте.
Поможем проверить текущее состояние. Проведем совместную дистанционную диагностику. Или приедем для полноценной проверки на месте.
Вызвать инженераЗаказать консультацию
Общие положения по обработке и дезинфекции гибкой эндоскопии
Гибкие эндоскопы подразделяют на аппараты для нестерильных и стерильных эндоскопических вмешательств.
Нестерильные вмешательства — эндоскопические операции исследования, при которых эндоскоп вводится в органы, в норме содержащие собственную микрофлору через естественные пути (ЖКТ, легочная система: верхние и нижние и дыхательные пути, наружнее и среднее ухо).
Эндоскопы для нестерильных вмешательств:
- Гастроскоп
- Колоноскоп
- Дуоденоскоп
- Бронхоскоп
- Холедохоскоп
Другими словами работать с гастроскопами, колоноскопами и бронхоскопами необходимо согласно правилам и алгоритмам обработки эндоскопов для нестерильных вмешательств.
Стерильными вмешательства: эндоскоп вводится через проколы и разрезы кожи и слизистых оболочек в сосуды, полости, ткани, в стерильные в норме органы (матка, мочевой пузырь) через естественные пути.
Эндоскопы для стерильных вмешательств
- Цистоскоп
- Уретроскоп
- Гистероскоп
- Резектоскоп
- Артроскоп
и другие. Здесь же отметим, что первые 4 эндоскопа могут выпускаться как жесткими, так и гибкими, в зависимости от цели исследования, операции.
Алгоритм обработки эндоскопов
Рассмотрим сначала общий алгоритм обработки эндоскопа.
Согласно методическим указаниям МУ 3.5.1937—04 общая последовательность действий при обработке и дезинфекции эндоскопов и инструментов к ним следующая:
-
Предварительная очистка
-
Окончательная очистка (очистка совмещенная с дезинфекцией) или предстерилизационная очистка
-
Дезинфекция высокого уровня (ДВУ) или Стерилизация
-
Хранение
Важно полностью следовать этому алгоритму, все инструкции ЛПУ должны быть составлены с его учетом.
|
|
|
Предварительная очистка |
Предварительная очистка |
|
Окончательная очистка |
Предстерилизационная очистка |
|
Дезинфекция высокого уровня |
Стерилизация |
|
Асептическое хранение |
Хранение в стерильных условиях |
Дезинфекции / стерилизации подлежат также емкости аспираторов и другая периферия.
Обработка, очистка и дезинфекция эндоскопа для нестерильных вмешательств
Дезинфекция и обработка гастроскопов, колоноскопов, бронхоскопов и прочих самых распространенных гибких эндоскопов выполняется в соответствии с данным алгоритмом.
Предварительная очистка эндоскопов
Предварительная очистка эндоскопа выполняется в процедурной / операционной / приемном кабинете, то есть, в помещении, где проводилось вмешательство, непосредственно (немедленно) после процедуры или операции. Откладывать обработку нельзя, чтобы не допустить фиксации загрязнений на внешних и внутренних поверхностях эндоскопа, так как, если это случится, стандартная обработка будет сильно затруднена. Возможно, потребуется разбор эндоскопа и чистка канала в сервисных условиях.
Предварительную очистку можно выполнять в специальных емкостях для обработки, например КДС-20, КДС-35 от КРОНТ или в передвижных моечных установках — ваннах, оборудованных лейками и доп. емкостями, например, мойках МИУ и УДЭ -1, УДЭ — 2 также производства КРОНТ.
Последовательность действий при предварительной очистке
- Подготовить обработанные заранее емкости с дезинфицирующим раствором / детергентом для предварительной очистки, выключить осветитель ( видеосистему или весь видеоэндоскопический центр — процессор).
- Включить аспирацию на 7 — 10 секунд для удаления остаточного содержимого из вводимой трубки эндоскопа.
- Очистить вводимую трубку (рабочую часть эндоскопа) от блока управления к дистальному концу салфеткой, смоченной в подготовленном растворе.
- Повторно включить аспирацию, закрывая клапан биопсийного инструментального канала.
- Промыть биопсийный канал (систему каналов) раствором средства для предварительной очистки. Чередовать дез. раствор (150-20 мл и более) и воздух аспирацией
- Промыть канал водой аналогичным образом (аспирацией / нагнетанием воды и воздуха)
- Промыть систему каналов вода/воздух (включа дополнительный канал подачи воды, если он присутствует в эндоскопе).
 Очистка каналов производится через специальный адаптер-трубку, который устанавливается на место клапана вода / воздух. Дистальный конец при промывании дополнительного водного канала должен находиться в чистой воде. Шприцом в данный канал вводится раствор / воздух последовательным чередованием, не менее 3 раз, пока из дистального конца не перестанут выделяться пузыри воздуха.
Очистка каналов производится через специальный адаптер-трубку, который устанавливается на место клапана вода / воздух. Дистальный конец при промывании дополнительного водного канала должен находиться в чистой воде. Шприцом в данный канал вводится раствор / воздух последовательным чередованием, не менее 3 раз, пока из дистального конца не перестанут выделяться пузыри воздуха. - После этого эндоскоп отключают от аспиратора, осветителя / процессора, отсоединяют от него клапаны, адаптер-промывочную трубку. Для видеоэндоскопа — надевают защитный колпак на коннектор видеоразъема.
- Доставка эндоскопа в моечно-дезинфекционное отделение (ЦСО) для окончательной очистки или предстерилизационной очистки. транспортировка допускается в специальных контейнерах (закрытые крышкой, снабженные маркировкой “загрязнено” в текстовом или цветовом виде)
 Очистка каналов производится через специальный адаптер-трубку, который устанавливается на место клапана вода / воздух. Дистальный конец при промывании дополнительного водного канала должен находиться в чистой воде. Шприцом в данный канал вводится раствор / воздух последовательным чередованием, не менее 3 раз, пока из дистального конца не перестанут выделяться пузыри воздуха.
Очистка каналов производится через специальный адаптер-трубку, который устанавливается на место клапана вода / воздух. Дистальный конец при промывании дополнительного водного канала должен находиться в чистой воде. Шприцом в данный канал вводится раствор / воздух последовательным чередованием, не менее 3 раз, пока из дистального конца не перестанут выделяться пузыри воздуха.На всех этапах (не только при предварительной очистке) важно обрабатывать все каналы эндоскопа, независимо от того, были они задействованы в исследовании или нет.
Входные отверстия, клапаны, и каналы подвергаются очистке специальными щетками, которые поставляются в комплекте с эндоскопом или приобретаются отдельно.
В зависимости от типа , производителя и модели эндоскопа, а также от наличия у него различных дополнительных каналов, данных алгоритм может немного изменяться. Например, некоторые производители могут добавить в рекомендации по обработке своих видеоэндоскопов положения по обработке оптики камеры щетками, протирке их спиртом и так далее.
Инструменты, использованные для исследований также подвергаются предварительной механической очистке и обработке.
Для транспортировки эндоскопов после предварительной очистки с отделение ЦСО (или помещение для дезинфекции эндоскопов) также используются отдельные контейнеры (например, КЭ КРОНТ — 1 и КЭ КРОНТ — 2).
Тест эндоскопа на герметичность
Сразу после предварительной очистки или непосредственно перед окончательной очисткой (в помещении для окончательно очистки) проводится тест эндоскопа на герметичность.
Пропускать этот этап категорически запрещено! Данные о герметичности эндоскопа крайне важны. Негерметичный эндоскоп категорически запрещено передавать на стадии окончательной — предстерилизационной очистки, тем более — ДВУ или стерилизации. Такие аппараты немедленно передаются в сервисную службу для диагностики и ремонта. Подробнее о проверке на герметичность и используемых для этого течеискателях рассказываем в отдельном материале нашего блога.
Устройства, установки и аппараты для предварительной очистки эндоскопа
Под устройствами для автоматической предварительной очистки чаще всего понимают и подразумевают аппараты для чистки каналов Подробнее о них мы писали в материале об установках для мойки эндоскопов.
Здесь отметим, что они могут использоваться как на стадии предварительной очистки (в процедурной или операционной), так и при окончательной / предстерилизационной очистке в моечно-дезинфекционном отделении.
Важно! Наличие устройства для чистки каналов не отменяет необходимости очистки их специальными щетками для удаления крупных частиц.
Аппараты имеют встроенный насос / аспиратор для автоматической подачи воздуха и дезраствора в каналы эндоскопа. Соответственно к аппарату необходимо подключить все имеющиеся каналы (независимо от того, пользовался ими врач при вмешательстве, или нет). Во всех устройствах также имеется блок управления и контроля. Чаще всего, время и количество циклов чистки каналов задается клавишами панели. Иногда программы можно вводить и сохранять в памяти устройства.
Перечислим популярные на нашем рынке аппараты для чистки и отмывки каналов
- Scope Buddy (Medivators, Cantel — США)
- Epw 100 / EPW 100 S (Steelco — США, Италия)
- E-Clean (Эндо Старс — Россия)
- ЭндоДез (Кронт — Россия)
Также все аппараты для автоматической мойки каналов имеют встроенную систему проверки на герметичность, то есть отдельный течеискатель вам в таком случае не понадобится (но как запасной вариант, а также для проверок его наличие все-таки крайне рекомендуется).
Окончательная очистка эндоскопа
Окончательная очистка эндоскопа производится в специальном помещении моечного дезинфекционного отделения или ЦСО, в грязной зоне. Потоки / логистика и оборудование в грязной и условно-чистой (чистой) зонах должны быть организованы таким образом, чтобы необработанные и обработанные эндоскопы и сотрудники, задействованные в этих операциях никогда не пересекались.
На данной стадии также может применяться окончательная очистка, совмещенная с дезинфекцией. В зависимости от этого выбирается используемое в ЛПУ моющее или моюще-дезинфицирующее средство. Выполнение окончательной очистки, совмещенной с дезинфекцией не отменяет необходимость выполнения ДВУ.
Окончательная очистка выполняется в сдвоенных санитарных раковинах с установленными лейками. Также, для окончательной, как и для первичной очистки, могут использоваться специальные передвижные мойки: МИУ Кронт, УДЭ-2 Кронт, или и аналоги.
Для ускорения процесса очистки могут применяться специальные устройства для промывки и чистки каналов эндоскопа (такие же, как и для предварительной очистки: Scope Buddy, ЭндоДез, и т. д.). Аппараты монтируются на стены над раковинами или устанавливаются на передвижные мойки и в процессе окончательной очистки подключаются ко всем каналам эндоскопа. С помощью ирригаторов / аспираторов и электронного блока управления машины обеспечивают качественную обработку внутренних поверхностей каналов моющим раствором, воздухом, спиртом.
д.). Аппараты монтируются на стены над раковинами или устанавливаются на передвижные мойки и в процессе окончательной очистки подключаются ко всем каналам эндоскопа. С помощью ирригаторов / аспираторов и электронного блока управления машины обеспечивают качественную обработку внутренних поверхностей каналов моющим раствором, воздухом, спиртом.
Алгоритм окончательной очистки (очистки, совмещенной с дезинфекцией) эндоскопа:
- Полностью погрузить эндоскоп в раковину / ванну с моющим (моюще-дезинфицирующим) средством. Клапаны должны быть сняты и промыты в том же растворе отдельно.
- С помощью промывочных трубок, подключенных к каналам эндоскопа и шприца или автоматического устройства для чистки заполнить каналы моющим раствором, отключить промывочные трубки от каналов эндоскопа.
- Оставить эндоскоп в растворе моюще-дезинфиирующего средства. Период экспозиции и концентрация должны быть указаны в инструкции по использованию препарата. Если дезинфицирующий раствор используется многократно (для чистки нескольких эндоскопов подряд), его концентрацию перед каждым циклом необходимо проверять с помощью специальных индикаторов.
- Извлечь эндоскоп из ванны / раковины с дез средством и протереть все внешние поверхности салфетками без выраженной структуры и ворса.
- Провести очистку торцов (в т.ч. дистального конца и оптики эндоскопа) салфетками, щетками.
- Очистить щеткой отверстия клапанов и сами клапаны при полном погружении в дезраствор.
- Очистить щетками биопсийный / аспирационный канал и каналы вода / воздух, Щетку необходимо вводить через отверстия биопсийного и аспирационного клапанов под углами в 90 и 45 градусов соотв. Дистальный конец должен быть выпрямлен, щетки при каждом движении выводятся из выходных отверстий каналов. Повторить движение не менее 3 раз или до прекращения выделения загрязнений. При каждом выходе щетки из канала ее необходимо очистить.
- Провести очистку всех систем каналов эндоскопа раствором дезсредства (не менее 90 мл на канал) с помощь. шприца, ирригатора или автоматического устройства для чистки. Производится очистка каналов биопсии / аспирации, вода/воздух, дополнительного канала подачи воды (если он есть).
- Просушить все каналы воздухом (активной аспирацией / подачей)
- Поместить эндоскоп в ванну / раковину / емкость с питьевой водой. При использовании одной емкости предварительно слить моющий раствор, ополоснуть емкость. При использовании сдвоенной раковины (или при многократном использовании моющего раствора) — переложить эндоскоп во вторую раковину / другую емкость.
- Выполнить ополаскивание всех поверхностей эндоскопа и всех каналов (через трубки-адаптеры).
- Извлечь эндоскоп из воды, слить воду, протереть насухо наружные поверхности, просушить каналы активной аспирацией воздуха, закрывая выходные отверстия каналов дистального конца чистыми салфетками.
- Проверка и контроль качества очистки эндоскопа может выполняться на завершающей стадии окончательной очистки путем взятия азопирамовой пробы (на остатки частиц крови и биологических жидкостей). Таким образом проверяется каждый десятый эндоскоп (минимум — 1 проверка за рабочую смену). После проверки наружных поверхностей и биопсийного канала их необходимо протереть салфеткой, смоченной в воде / промыть канал 20-30 мл воды, повторно просушить


 После проверки наружных поверхностей и биопсийного канала их необходимо протереть салфеткой, смоченной в воде / промыть канал 20-30 мл воды, повторно просушить
После проверки наружных поверхностей и биопсийного канала их необходимо протереть салфеткой, смоченной в воде / промыть канал 20-30 мл воды, повторно просушитьПосле выполнения всех операций эндоскоп передается на дезинфекцию высокого уровня в чистую зону помещения.
ДВУ — Дезинфекция эндоскопа высокого уровня
Дезинфекция высокого уровня при правильном выполнении убивает все патогенные и условно-патогенные микроорганизмы: бактерии, микобактерии туберкулеза, вирусы, грибки Candida, снижает количество спор.
Алгоритм ручной дезинфекции высокого уровня эндоскопа
- Эндоскоп погружается в ванну — емкость с подготовленным раствором или готовым средством для ДВУ (концентрация и объем выдерживаются согласно инструкции к средству).
- При полном погружении эндоскопа необходимо заполнить раствором средства все каналы (через переходные адаптеры, трубки с помощью шприца или ирригатора / аспиратора в составе отдельного устройства для обработки каналов.
- Удалить все пузырьки воздуха с поверхности эндоскопа салфеткой
- Оставить эндоскоп в растворе на время, указанное в инструкции по применению средства для ДВУ.
- Стерильным шприцем или устройством для чистки каналов удалить раствор из внутреннего объема каналов подачей воздуха. Эти и дальнейшие действия необходимо выполнять в стерильных перчатках.
- Извлечь эндоскоп из раствора для ДВУ, поместить его в ванну — емкость со свежей питьевой водой (эндоскопы для гастроинтестинальных исследований: дезинфекция гастроскопа, колоноскопа и др.) или стерилизованной / кипяченой / фильтрованной водой (для обработки бронхоскопов).
- Промыть все каналы не менее 90 мл воды на каждый, выполнить сушку воздухом.
- Отсоединить все переходники, достать из емкости переходные трубки, клапаны, доп устройства, выложить на поверхность со стерильной салфеткой.
- Повторно ополоснуть поверхности эндоскопа, извлечь его на стерильную салфетку, протереть все поверхности.
- Выполнить сушку каналов воздухом
- Выполнить сушку каналов 70% раствором спирта (этиловый, изопропиловый) с помощью стерильного шприца или устройства для обработки каналов. Повторно просушить каналы воздухом
- Далее эндоскоп передается на сушку и хранение. Предпочтительно — с использованием специального устройства — шкафа, обеспечивающего безопасные условия.


На этом дезинфекцию высокого уровня можно считать оконченной.
Принципы машинной обработки эндоскопов (в МДМ)
При использовании автоматической моечной машины (репроцессора, моечно — дезинфицирующей машины) необходимо в первую очередь свериться с инструкцией по эксплуатации вашей МДМ.
- Эндоскоп после окончательной очистки помещается в емкость моечной машины
- Все каналы и служебные выходы эндоскопа подключаются к машине комплектными переходниками
- Емкость закрывается крышкой
- Проверяется наличие, концентрация и качество дезинфицирующего раствора. спирта, воды (автоматически средствами моечной машины или вручную. Проверка также возможна перед началом цикла, или по наличию сигнала автоматической системы сигнализации в МДМ).
- На панели управления машиной оператор выбирает соответствующую программу или вводит параметры цикла (также — свои данные и данные эндоскопа, если это предусмотрено машиной).
- По окончании цикла ДВУ и сушки эндоскоп транспортируется для хранения в специальном шкафу.
 спирта, воды (автоматически средствами моечной машины или вручную. Проверка также возможна перед началом цикла, или по наличию сигнала автоматической системы сигнализации в МДМ).
спирта, воды (автоматически средствами моечной машины или вручную. Проверка также возможна перед началом цикла, или по наличию сигнала автоматической системы сигнализации в МДМ).Требования к моечным машинам для эндоскопов (МДМ)
- Наличие сертификации (РУ, Сертификат соответствия)
- Наличие режима само дезинфекции
- Совместимость МДМ (моечно — дезинфицирующей машины) с производителями и моделями используемых эндоскопов
- Совместимость с используемыми в ЛПУ дезинфектантами
- Техническая совместимость с коммуникациями и возможность установки МДМ в помещении дезинфекционного отделения
- Наличие полноценной русскоязычной инструкции пользователя ( в том числе полное руководство по заправке составов, загрузке эндоскопов, проверке на герметичность, если предусмотрено, и т. д.)
 д.)
д.)Принципы и инструкции по механизированной (автоматической ) обработки эндоскопов в МДМ предполагают обязательное прохождение эндоскопом стадий предварительной и окончательной очистки перед помещением в МДМ.
При вводе МДМ в эксплуатацию, в т.ч. при первом пуске после простоя свыша 1 месяца необходимо проведение тестов.
Гастроскопы, колоноскопы и бронхоскопы могут обрабатываться в одной машине последовательно, если:
- Используются средства, эффективные при автоматической обработке, группы веществ рекомендованы производителем МДМ, или указаны как совместимые. Также необходимо свериться с СП 3.1.3263-15
- Средства (растворы) используются однократно. При многократном использовании МДМ обязательно должна быть оборудована устройством контроля концентрации и сигнализации для оператора.
- В МДМ присутствуют оригинальные переходники для всех используемых эндоскопов.
В противном случае для обработки бронхоскопа необходимо выделить отдельную МДМ.
Вызвать инженераЗаказать консультацию
Важно: Все вспомогательные приспособления, которые использовались на этапах окончательной очистки подлежат отдельным циклам дезинфекции.
Контентная обработка и анализ эндоскопических изображений и видео: обзор
Акерман Дж. Д., Келлер К., Фукс Х (2002) Реконструкция поверхности органов брюшной полости с использованием лапароскопического структурированного света для дополненной реальности. В: Electronic Imaging 2002, стр 39–46. Международное общество оптики и фотоники
Агравал М., Конолиге К., Блас М.Р. (2008) CenSurE: Экстремумы центрального окружения для обнаружения и согласования функций в реальном времени. В: Компьютерное зрение — ECCV 2008, вып.5305 в LNCS, стр 102–115. Springer
 org/ScholarlyArticle»> 3.
org/ScholarlyArticle»> 3.Ahmadi SA, Sielhorst T., Stauder R, Horn M, Feussner H, Navab N (2006) Восстановление хирургического рабочего процесса без явных моделей. В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2006, no. 4190 в LNCS, стр. 420–428. Springer
Александр Л., Нобре Н., Кастелейро Дж. (2008) Характеристики цвета и положения в зависимости от текстуры для эндоскопического обнаружения полипов. В: Международная конференция по биомедицинской инженерии и информатике.BMEI 2008, том 2, стр 38–42
Аллан М., Урселин С., Томпсон С., Хоукс Д., Келли Дж., Стоянов Д. (2013) На пути к обнаружению и локализации инструментов в минимально инвазивной хирургии. IEEE Trans Biomed Eng 60 (4): 1050–1058
Статья Google ученый
 org/ScholarlyArticle»> 6.
org/ScholarlyArticle»> 6.Амелинг С., Вирт С., Паулюс Д., Лейси Г., Виларино Ф. (2009) Обнаружение полипов на основе текстуры при колоноскопии. В: Bildverarbeitung für die Medizin 2009, стр. 346–350.Springer
Амир-Халили А., Пейрат Дж. М., Хамарнех Г., Абугарбие Р. (2013) Трехмерная реконструкция поверхности органов с использованием приоров формы пациента в роботизированной лапароскопической хирургии. В: Абдоминальная визуализация. Вычисление и клиническое применение, вып. 8198 в LNCS, стр. 184–193. Springer
Арнольд М., Гош А., Амелинг С., Лейси Дж. (2010) Автоматическая сегментация и окраска зеркальных бликов для эндоскопической визуализации. Журнал EURASIP по обработке изображений и видео: 1–12
 org/ScholarlyArticle»> 9.
org/ScholarlyArticle»> 9.Арнольд М., Гош А., Лейси Г., Патчетт С., Малкахи Х. (2009) Нечеткое обнаружение кадра в видео колоноскопии. В: Машинное зрение и обработка изображений, 2009. IMVIP ’09. 13th International, pp 47–52
Atasoy S, Mateus D, Lallemand J, Meining A, Yang GZ, Navab N (2010) Эндоскопические видеоколлекторы. Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2010: 437–445
Статья Google ученый
Barreto J, Roquette J, Sturm P, Fonseca F (2009) Автоматическая калибровка камеры, применяемая в медицинской эндоскопии. В: 20-я Британская конференция по машинному зрению (BMVC ’09)

Баррето Дж., Сваминатан Р., Рокетт Дж. (2007) Непараметрическая коррекция искажений в эндоскопических медицинских изображениях. In: 3DTV Conference, 2007, pp 1–4
Башар М., Китасака Т., Суэнага Й., Мекада Ю., Мори К. (2010) Автоматическое обнаружение информационных кадров на изображениях эндоскопической беспроводной капсулы.Med Image Anal 14 (3): 449–470
Статья Google ученый
Баумхауэр М., Фейерштейн М., Мейнзер HP, Рассвайлер Дж. (2008) Навигация в эндоскопической хирургии мягких тканей: перспективы и ограничения. J Endourol 22 (4): 751–766
Статья Google ученый

Bay H, Tuytelaars T, Gool LV (2006) SURF: Ускоренные надежные функции. В: Компьютерное зрение — ECCV 2006, вып.3951 в LNCS, стр. 404–417. Springer
Beecks C, Schoeffmann K, Lux M, Uysal MS, Seidl T. (2015) Эндоскопическое извлечение видео: подход на основе подписи для связывания эндоскопических изображений с видео сегментами. В: Международный симпозиум IEEE по мультимедиа. ISM, Miami
Беренс А., Таками М., Гросс С., Аах Т. (2011) Обнаружение пропусков в эндоскопических видеопоследовательностях с использованием графиков. В: Ежегодная международная конференция IEEE Engineering in Medicine and Biology Soc, 2011 г., стр. 6635–6638
Бехар Аро Б., Запелла Л., Видал Р. (2012) Классификация хирургических жестов на основе видеоданных. Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2012: 34–41
(2012) Классификация хирургических жестов на основе видеоданных. Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2012: 34–41
Google ученый
Берген Т., Виттенберг Т. (2014) Сшивание и реконструкция поверхности на основе последовательностей эндоскопических изображений: обзор приложений и методов. Журнал IEEE по биомедицинской и медицинской информатике, PP (99): 1–1
Google ученый
Бернал Дж., Гил Д., Санчес К., Санчес Ф. Дж. (2014) Отказ от неинформативных областей для эффективного анализа изображений при колоноскопии. В: Компьютерная и роботизированная эндоскопия, LNCS, стр. 1–10. Springer
 org/ScholarlyArticle»> 21.
org/ScholarlyArticle»> 21.Бернал Дж., Санчес Дж., Вилариньо Ф. (2012) На пути к автоматическому обнаружению полипов с помощью модели внешнего вида полипа. Распознавание образов 45 (9): 3166–3182
Статья Google ученый
Bernhardt S, Abi-Nahed J, Abugharbieh R (2013) Надежная плотная эндоскопическая стерео реконструкция для малоинвазивной хирургии.В кн .: Медицинское компьютерное зрение. Методы распознавания и их применение в медицинской визуализации. Springer, pp. 254–262
Бихлмайер С., Хайнинг С.М., Фейерштейн М., Наваб Н. (2009) Виртуальное зеркало: новая парадигма взаимодействия для сред дополненной реальности. IEEE Trans Med Imaging 28 (9): 1498–1510
Статья Google ученый
 org/ScholarlyArticle»> 24.
org/ScholarlyArticle»> 24.Билодо Г.А., Шу Й., Чериет Ф. (2006) Многоступенчатая графическая сегментация торакоскопических изображений.Comput Med Imaging Graph 30 (8): 437–446
Статья Google ученый
Блюм Т., Фойсснер Х., Наваб Н. (2010) Моделирование и сегментация хирургического рабочего процесса на основе лапароскопического видео. Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2010: 400–407
Статья Google ученый
Bouarfa L, Akman O, Schneider A, Jonker PP, Dankelman J (2012) Отслеживание хирургических инструментов в режиме реального времени in vivo в эндоскопическом видео.Минимально инвазивные Ther Allied Technol 21 (3): 129–134
Статья Google ученый
 org/ScholarlyArticle»> 27.
org/ScholarlyArticle»> 27.Брага Дж., Ларанхо И., Ассунсао Д., Роланда С., Лопес Л., Коррейя-Пинто Дж., Алвес В. (2013) Результаты эндоскопической визуализации: решение на базе Интернета с диффузией видео. Процедура Technol 9: 1123–1131
Статья Google ученый
Брага Дж., Ларанхо И., Роланда С., Лопес Л., Коррейя-Пинто Дж., Алвес В. (2014) Новый подход к архивации эндоскопических исследований.В кн .: Новые перспективы информационных систем и технологий, Том 1, вып. 275 в достижениях в области интеллектуальных систем и вычислений. Springer, pp. 239–248
Бак С.Д., Клейненбройгель Дж. В., Гейс И., Конинккс Т., Конинк П.Р., Суэтенс П. (2001) Система для поддержки лапароскопической хирургии с помощью визуализации дополненной реальности. В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2001, no. 2208 в LNCS, стр. 691–698. Springer
В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2001, no. 2208 в LNCS, стр. 691–698. Springer
Burschka D, Corso JJ, Dewan M, Lau W, Li M, Lin H, Marayong P, Ramey N, Hager GD, Hoffman B et al (2005) Навигация по внутреннему пространству: трехмерная помощь для малоинвазивная хирургия.Робот Auton Syst 52 (1): 5–26
Артикул Google ученый
Burschka D, Li M, Ishii M, Taylor RH, Hager GD (2005) Масштабно-инвариантная регистрация монокулярных эндоскопических изображений на компьютерной томографии для хирургии носовых пазух. Med Image Anal 9 (5): 413–426
Статья Google ученый
 org/ScholarlyArticle»> 32.
org/ScholarlyArticle»> 32.Calonder M, Lepetit V, Strecha C, Fua P (2010) КРАТКОЕ ОПИСАНИЕ: Бинарные устойчивые независимые элементарные функции.Springer
Cano A, Gayá F, Lamata P, Sánchez-González P, Gómez E (2008) Метод отслеживания лапароскопических инструментов для хирургических приложений с дополненной реальностью. Биомедицинское моделирование: 191–196
Цао Й., Лю Д., Таванапонг В., Вонг Дж., О Дж., Де Гроен П. (2007) Компьютерное обнаружение диагностических и терапевтических операций в видео колоноскопии. IEEE Trans Biomed Eng 54 (7): 1268–1279
Статья Google ученый
Cao Y, Tavanapong W, Li D, Oh J, Groen PCD, Wong J (2004) Подход с использованием визуальной модели для анализа видео о колоноскопии. В: Восстановление изображений и видео, № 3115 в LNCS, стр. 160–169. Springer
В: Восстановление изображений и видео, № 3115 в LNCS, стр. 160–169. Springer
Casals A, Amat J, Laporte E (1996) Автоматическое руководство робота-помощника в лапароскопической хирургии. В: IEEE International Conference on Robotics and Automation, pp 895–900
Chattopadhyay T, Chaki A, Bhowmick B, Pal A (2008) Приложение для извлечения кадров из видео лапароскопической хирургии на основе изображения запроса инструмент.В: TENCON 2008-2008 IEEE Region 10 Conference, pp 1–5
Chhatkuli A, Bartoli A, Malti A, Collins T (2014) Разбор живых изображений при лапароскопии матки. В: Международный симпозиум IEEE по биомедицинской визуализации (ISBI)
 org/Book»> 39.
org/Book»> 39.Чоудхури М., Кунду М.К. (2015) Система поиска эндоскопических изображений с использованием функций многомасштабного изображения. В: Материалы 2-й Международной конференции по восприятию и машинному интеллекту, PerMIn ’15. ACM, Нью-Йорк, Нью-Йорк, США, стр. 64-70
Google ученый
Chu X, Poh C, Li L, Chan K, Yan S, Shen W, Htwe T, Liu J, Lim J, Ong E, Ho K (2010) Краткое обобщение беспроводных капсульных эндоскопических видео для эффективной визуализации. В: MICCAI 2010, no. 6362 в LNCS, стр. 522–529. Springer
Climent J, Hexsel RA (2012) Фильтрация частиц в пространстве Хафа для отслеживания инструментов. Comput Biol Med 42 (5): 614–623
Статья Google ученый
 org/ScholarlyArticle»> 42.
org/ScholarlyArticle»> 42.Коллинз Т., Бартоли А. (2012) Трехмерная реконструкция в лапароскопии с фотометрической стереосистемой ближнего действия.В: Вычисление медицинских изображений и компьютерное вмешательство-MICCAI 2012. Springer, pp 634–642
Коллинз Т., Бартоли А. (2012) К живой монокулярной трехмерной лапароскопии с использованием информации о затенении и отражении. В: Инф. Proc. в компьютерных вмешательствах, нет. 7330 в LNCS, стр. 11–21. Springer
Collins T, Compte B, Bartoli A (2011) Деформируемая форма от движения в лапароскопии с использованием жесткого скользящего окна. В: Конференция по изучению и анализу медицинских изображений
Коллинз Т., Писарро Д. , Бартоли А., Канис М., Бурдель Н. (2014) Компьютерная лапароскопическая миомэктомия путем увеличения матки с помощью данных дооперационной МРТ. В: 2014 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), pp. 243–248
, Бартоли А., Канис М., Бурдель Н. (2014) Компьютерная лапароскопическая миомэктомия путем увеличения матки с помощью данных дооперационной МРТ. В: 2014 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), pp. 243–248
Cunha J, Coimbra M, Campos P, Soares J (2008) Автоматизированная топографическая сегментация и оценка времени прохождения при исследовании эндоскопической капсулы . IEEE Trans. Med. Imaging 27 (1): 19–27
Статья Google ученый
Дахайот Р., Вилариньо Ф, Лейси Г. (2008) Улучшение качества цветных видеороликов колоноскопии. Журнал EURASIP по обработке изображений и видео, 2008: 1–7
Статья Google ученый
 org/ScholarlyArticle»> 48.
org/ScholarlyArticle»> 48.Deguchi D, Mori K, Feuerstein M, Kitasaka T., Maurer Jr. CR, Suenaga Y, Takabatake H, Mori M, Natori H (2009) Выборочная мера сходства изображений для отслеживания бронхоскопом на основе регистрации изображений. Med Image Anal 13 (4): 621–633
Статья Google ученый
Dhandra BV, Hegadi R, Hangarge M, Malemath VS (2006) Анализ аномальности в эндоскопических изображениях с использованием комбинированного цветового пространства hsi и сегментации водораздела. В: 18-я Международная конференция по распознаванию образов, 2006, том 4, ICPR 2006. pp 695–698
Dickens M, Bornhop DJ, Mitra S (1998) Устранение интерференции оптического волокна на цветных микроэндоскопических изображениях. В: 11-й симпозиум IEEE по компьютерным медицинским системам, стр. 246–251
246–251
Dixon B, Daly M, Chan H, Vescan A, Witterick I, Irish J (2013) Хирурги, ослепленные улучшенной навигацией: эффект дополненной реальности на внимание.Surg Endosc 27 (2): 454–461
Артикул Google ученый
Doignon C, Nageotte F, de Mathelin M (2006) Роль точек вставки в обнаружении и позиционировании инструментов в лапароскопии для роботизированных задач. MICCAI: 527–534
Doignon C, Nageotte F, de Mathelin M (2007) Сегментация и управление множественными жесткими объектами для интраоперационного эндоскопического зрения. В: Материалы Международной конференции по динамическому зрению 2005/2006 г., WDV’05 / WDV’06 / ICCV’05 / ECCV’06, стр. 314–327.Springer-Verlag, Берлин, Гейдельберг
314–327.Springer-Verlag, Берлин, Гейдельберг
Google ученый
Doignon C, Nageotte F, Maurin B, Krupa A (2008) Оценка позы и отслеживание особенностей для роботизированной хирургии с медицинской визуализацией. В: Объединение перспектив в компьютерном зрении и зрении роботов, № 8 в конспектах лекций по электротехнике, стр. 79–101. Спрингер, США
Google ученый
Дуда К., Зелински Т., Дюплага М. (2008) Простой в вычислительном отношении алгоритм сверхвысокого разрешения для видео с эндоскопической капсулы.В: Int’l Conf. по сигналам и электронным системам, 2008. ICSES ’08, pp. 197–200
Duplaga M, Leszczuk M, Papir Z, Przelaskowski A (2008) Оценка сохраняющей качества диагностической достоверности хирургических видеозаписей. В кн .: Визуальные информационные системы. Веб-поиск визуальной информации и управление ею, нет. 5188 в LNCS, стр. 227–230. Springer
В кн .: Визуальные информационные системы. Веб-поиск визуальной информации и управление ею, нет. 5188 в LNCS, стр. 227–230. Springer
Элтер М., Рупп С., Винтер С. (2006) Физически мотивированная реконструкция фиброскопических изображений. В: 18-я Международная конференция по распознаванию образов, 2006.ICPR 2006, том 3, стр. 599–602
Forestier G, Lalys F, Riffaud L, Trelhu B, Jannin P (2012) Классификация хирургических процессов с использованием динамического преобразования времени. J Biomed Inform 45 (2): 255–264
Статья Google ученый
Фукс Х., Ливингстон М.А., Раскар Р., Штат А, Кроуфорд Дж.Р., Радемахер П., Дрейк С. Х., Мейер А.А. (1998) Визуализация дополненной реальности для лапароскопической хирургии. В кн .: Материалы 1-й Международной конф.по медицинской обработке изображений и компьютерному вмешательству. Springer, pp 934–943
Fukuda N, Chen YW, Nakamoto M, Okada T., Sato Y (2010) Метод отслеживания вращения цилиндра прицела для эндоскопов с наклонным обзором без прикрепленного сенсорного устройства. В: 2-я Международная конференция по разработке программного обеспечения и интеллектуального анализа данных (SEDM), 2010 г., стр. 684–687
Gambadauro P, Magos A (2012) Хирургические видеоролики для анализа несчастных случаев, повышения производительности и предотвращения осложнений: время для Хирургический черный ящик? Surg Innov 19 (1): 76–80
Статья Google ученый
 org/ScholarlyArticle»> 62.
org/ScholarlyArticle»> 62.Gavião W, Scharcanski J, Frahm JM, Pollefeys M (2012) Обобщение и просмотр видео гистероскопии путем оценки внимания врача к фрагментам видео. Med Image Anal 16 (1): 160–176
Статья Google ученый
Geng J, Xie J (2014) Обзор методов трехмерной эндоскопической визуализации поверхности. IEEE Sensors J 14 (4): 945–960
Артикул Google ученый
Giannarou S, Visentini-Scarzanella M, Yang GZ (2009) Аффинно-инвариантный анизотропный детектор для отслеживания мягких тканей в минимально инвазивной хирургии. В: От нано к макро, 2009. ISBI’09. IEEE International Symposium on Biomedical Imaging, pp 1059–1062
 org/ScholarlyArticle»> 65.
org/ScholarlyArticle»> 65.Giannarou S, Yang GZ (2010) Представление хирургического рабочего процесса на основе содержания с использованием вероятностного моделирования движения. В: Мед. Imaging и Aug. Reality, нет. 6326 в LNCS, стр. 314–323. Springer
Giritharan B, Yuan X, Liu J, Buckles B, Oh J, Tang S (2008) Обнаружение кровотечения из видео капсульной эндоскопии.В: 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2008. EMBS 2008, pp. 4780–4783
Grasa O, Civera J, Montiel JMM (2011) Монокуляр EKF SLAM с перемещением для лапароскопических последовательностей . В: Международная конференция IEEE по робототехнике и автоматизации (ICRA), 2011 г., стр. 4816–4821
 org/ScholarlyArticle»> 68.
org/ScholarlyArticle»> 68.Grega M, Leszczuk M, Duplaga M, Fraczek R (2010) Алгоритмы автоматического распознавания неинформативных кадров в видеозаписях бронхоскопических процедур.In: Information Technologies in Biomedicine, Advances in Intelligent and Soft Computing, vol 69. Springer, pp 535–545
Groch A, Seitel A, Hempel S, Speidel S, Engelbrecht R, Penne J, Höller K, Röhl S, Yung K, Bodenstedt S, Pflaum F, dos Santos TR, Mersmann S, Meinzer HP, Hornegger J, Maier-Hein L. (2011) Трехмерная реконструкция поверхности для лапароскопических компьютерных вмешательств: сравнение состояния -искусственные методы. В: Серия конференций Общества инженеров по фотооптическому оборудованию (SPIE), том 7964, стр. 796415
Gröger M, Ortmaier T, Hirzinger G (2005) Замена зеркальных отражений на основе структурного тензора для улучшения отслеживания поверхности сердца. В: Bildverarbeitung f. d. Медицина 2005, Информатик акт. Springer, pp 242–246
В: Bildverarbeitung f. d. Медицина 2005, Информатик акт. Springer, pp 242–246
Грёгер М., Зепп В., Ортмайер Т., Хирцингер Г. (2001) Реконструкция структуры изображения в присутствии зеркальных отражений. В кн .: Материалы 23-го ДАГМ-симпозиума. по распознаванию образов. Springer, pp 53–60
Gschwandtner M, Liedlgruber M, Uhl A, Vécsei A (2010) Экспериментальное исследование влияния коррекции деформации эндоскопа на компьютерную диагностику целиакии.В: 2010 10-я Международная конференция IEEE по информационным технологиям и приложениям в биомедицине (ITAB), стр. 1–6
Гуггенбергер М., Риглер М., Люкс М., Халворсен П. (2014) Видео о событиях в эндоскопической хирургии. В: Материалы 1-го международного семинара ACM по человеко-центрированному пониманию событий из мультимедиа, HuEvent ’14, стр. 17–22. ACM, Нью-Йорк, Нью-Йорк, США
17–22. ACM, Нью-Йорк, Нью-Йорк, США
Google ученый
Guthart G, Salisbury Jr JK (2000) Телехирургическая система IntuitiveTM: обзор и применение.In: ICRA, pp 618–621
Hafner M, Liedlgruber M, Uhl A (2013) Сверхразрешение на основе POCS для видеокадров HD-эндоскопии. В: 26-й Международный симпозиум IEEE по компьютерным медицинским системам (CBMS), 2013 г., стр. 185–190
Hafner M, Liedlgruber M, Uhl A, Wimmer G (2014) Оценка методов сверхвысокого разрешения в контексте классификации полипов толстой кишки. В: 12-й Международный семинар по индексированию мультимедиа на основе контента
 org/ScholarlyArticle»> 77.
org/ScholarlyArticle»> 77.Хелферти Дж. П., Чжан С., МакЛеннан Г., Хиггинс В.Е. (2001) Видеоэндоскопическая коррекция искажений и ее применение в виртуальном руководстве эндоскопии.IEEE Trans Med Imaging 20 (7): 605–617
Статья Google ученый
Hernández-Mier Y, Blondel W, Daul C, Wolf D, Guillemin F (2010) Быстрое построение панорамных изображений для цистоскопического исследования. Comput Med Imaging Graph 34 (7): 579–592
Статья Google ученый
Хиггинс В.Е., Хелферти Дж. П., Лу К., Мерритт С.А., Рай Л., Ю. К. К. (2008) 3D CT-Video Fusion для бронхоскопии под визуальным контролем.Comput Med Imaging Graph 32 (3): 159–173
Статья Google ученый
 org/ScholarlyArticle»> 80.
org/ScholarlyArticle»> 80.Холлер К., Пенне Дж., Хорнеггер Дж., Шнайдер А., Гиллен С., Фойсснер Х, Ян Дж., Гутьеррес Дж., Виттенберг Т. (2009) Клиническая оценка одобрения: коррекция эндоскопических изображений с помощью гравитации. В: Proceedings of 6th Int’l Symp. on Image and Signal Processing and Analysis, ISPA 2009, pp 713-717
Hu M, Penney G, Figl M, Edwards P, Bello F, Casula R, Rueckert D, Hawkes D (2012) Реконструкция 3D-поверхность из видео, устойчивая к отсутствующим данным и выбросам: применение в минимально инвазивной хирургии с использованием стерео и моноэндоскопов.Med Image Anal 16 (3): 597–611
Статья Google ученый
Hughes-Hallett A, Mayer EK, Marcus HJ, Cundy TP, Pratt PJ, Darzi AW, Vale JA (2014) Частичная нефрэктомия с дополненной реальностью: изучение текущего состояния и будущих перспектив. Урология 83 (2): 266–273
Урология 83 (2): 266–273
Статья Google ученый
Hwang S, Celebi M (2010) Обнаружение полипов в видео с беспроводной капсульной эндоскопией на основе сегментации изображения и геометрических характеристик.В: Международная конференция IEEE по акустической обработке речи и сигналов (ICASSP), 2010 г., стр. 678–681
Hwang S, Oh JH, Lee JK, Cao Y, Tavanapong W, Liu D, Wong J, de Groen PC (2005) Автоматическое измерение показателей качества видео о колоноскопии. В: Материалы 13-й ежегодной международной конференции ACM по мультимедиа, стр. 912–921
Hwang S, Oh JH, Tavanapong W., Wong J, de Groen PC (2008) Обнаружение стула в видео колоноскопии. В: 30-я ежегодная международная конференция общества инженеров IEEE в медицине и биологии, 2008 г.EMBS 2008. pp 3004–3007
В: 30-я ежегодная международная конференция общества инженеров IEEE в медицине и биологии, 2008 г.EMBS 2008. pp 3004–3007
Iakovidis DK, Maroulis DE, Karkanis SA, Brokos A (2005) Сравнительное исследование особенностей текстуры для различения полипов желудка в эндоскопическом видео. In: Proceedings of the 18th IEEE Symposium on Computer-Based Medical Systems, pp 575–580
Iakovidis DK, Tsevas S, Polydorou A (2010) Сокращение времени считывания эндоскопии капсулы за счет неконтролируемого анализа изображений. Comput Med Imaging Graph 34 (6): 471–478
Статья Google ученый
Ieiri S, Uemura M, Konishi K, Souzaki R, Nagao Y, Tsutsumi N, Akahoshi T, Ohuchida K, Ohdaira T, Tomikawa M, Tanoue K, Hashizume M, Taguchi T (2012) Система навигации с дополненной реальностью для лапароскопической спленэктомии в детям на основе предоперационного КТ изображения с помощью устройства оптического слежения. Pediatr Surg Int 28 (4): 341–346
Pediatr Surg Int 28 (4): 341–346
Статья Google ученый
Джун С.К., Нараянан М., Агарвал П., Эддиб А., Сингхал П., Гаримелла С., Крови В. (2012) Минимально инвазивная роботизированная оценка хирургических навыков на основе автоматизированных исследований движения с помощью видеоанализа.В: 2012 4th IEEE RAS EMBS Int’l Con. по биомедицинской робототехнике и биомехатронике (BioRob), стр. 25–31
Каллемейн Н.А., Гросланд Н.М., Магнотта В.А., Мартин Дж. А., Педерсен Д. Р. (2007) Коррекция артроскопической деформации линзы при динамической нагрузке на хрящ. Iowa Orthop J 27: 52–57
Google ученый

Kanaya J, Koh E, Namiki M, Yokawa H, Kimura H, Abe K (2008) Система для определения мест наблюдения при цистоскопии.В: Proceedings of the 9th Asia Pacific Industrial Engineering & Management Systems Conf., Pp. 2388–2392
Караргирис А., Бурбакис Н. (2010) Беспроводная капсульная эндоскопия и эндоскопическая визуализация: представлен обзор различных методологий. IEEE Eng Med Biol Mag 29 (1): 72–83
Статья Google ученый
Карканис С., Яковидис Д., Марулис Д., Каррас Д., Циврас М. (2003) Компьютерное обнаружение опухолей в эндоскопическом видео с использованием функций цветных вейвлетов.IEEE Trans Inf Technol Biomed 7 (3): 141–152
Статья Google ученый
 org/ScholarlyArticle»> 94.
org/ScholarlyArticle»> 94.Катич Д., Векерле А.Л., Гертнер Ф., Кеннготт Х.Г., Мюллер-Стих Б.П., Диллманн Р., Шпайдель С. (2014) Формирование лапароскопических операций на основе знаний для интраоперационной контекстно-зависимой помощи на основе правил. В кн .: Обработка информации в компьютерных вмешательствах, вып. 8498 в LNCS. Springer, pp. 158–167
Katić D, Wekerle AL, Görtler J, Spengler P, Bodenstedt S, Röhl S, Suwelack S, Kenngott HG, Wagner M, Müller-Stich BP, Dillmann R, Speidel S ( 2013) Контекстно-зависимая дополненная реальность в лапароскопической хирургии.Comput Med Imaging Graph 37 (2): 174–182
Статья Google ученый
Келли В.Е. (2008) Эволюция лапароскопии и революция в хирургии за десятилетие 1990-х. JSLS: Журнал Общества лапароэндоскопических хирургов 12 (4): 351–357
MathSciNet Google ученый
 org/ScholarlyArticle»> 97.
org/ScholarlyArticle»> 97.Khatibi T, Sepehri MM, Shadpour P (2014) Новый неконтролируемый подход к минимально инвазивной сегментации видео.Журнал медицинских сигналов и датчиков 4 (1): 53–71
Google ученый
Klank U, Padoy N, Feussner H, Navab N (2008) Автоматическое создание признаков на эндоскопических изображениях. Int J Comput Assist Radiol Surg 3 (3–4): 331–339
Статья Google ученый
Ko SY, Lee WJ, Kwon DS (2010) Интеллектуальное взаимодействие на основе модели хирургической задачи для робота-помощника хирурга: Осведомленность о текущих этапах хирургического вмешательства на основе модели хирургической процедуры.Int J Control Autom Syst 8 (4): 782–792
Артикул Google ученый
 org/ScholarlyArticle»> 100.
org/ScholarlyArticle»> 100.Кондо В., Зомер М.Т. (2014) Видеозапись лапароскопической хирургии для лечения эндометриоза должна быть систематической !. Gynecol Obstet 04 (04)
Koninckx PR (2008) Видеорегистрация хирургии должна использоваться в качестве контроля качества. J Minim Invasive Gynecol 15 (2): 248–253
Статья Google ученый
Koppel D, Wang YF, Lee H (2004) Визуализация и моделирование на основе изображений в видеоэндоскопии. В: IEEE International Symposium on Biomedical Imaging: Nano to Macro, 2004, vol 1, pp 269–272
Kranzfelder M, Schneider A, Fiolka A, Schwan E, Gillen S, Wilhelm D, Schirren R, Reiser S, Jensen B, Feussner H (2013) Обнаружение инструментов в режиме реального времени в минимально инвазивной хирургии с использованием технологии радиочастотной идентификации. J Surg Res 185 (2): 704–710
J Surg Res 185 (2): 704–710
Статья Google ученый
Крижевский А., Суцкевер И., Хинтон Г.Е. (2012) Классификация Imagenet с глубокими сверточными нейронными сетями. In: Advances in neural processing systems, pp 1097–1105
Krupa A, Gangloff J, Doignon C, de Mathelin M, Morel G, Leroy J, Soler L, Marescaux J (2003) Autonomous 3-d позиционирование хирургических инструментов в роботизированной лапароскопической хирургии с использованием визуального сервоуправления. IEEE Trans Robot Autom 19 (5): 842–853
MATH Статья Google ученый
Кумар А., Ким Дж., Цай В., Фулхэм М. , Фенг Д. (2013) Поиск медицинских изображений на основе контента: обзор приложений к многомерным и мультимодальным данным. J Digit Imaging 26 (6): 1025–1039
, Фенг Д. (2013) Поиск медицинских изображений на основе контента: обзор приложений к многомерным и мультимодальным данным. J Digit Imaging 26 (6): 1025–1039
Артикул Google ученый
Кумар С., Нараянан М., Сингхал П., Корсо Дж., Крови В. (2013) Продукт экспертов по отслеживанию для визуального отслеживания хирургических инструментов. В: Международная конференция IEEE по науке и технике в области автоматизации (CASE), 2013 г., стр. 480–485
Kumar S, Narayanan M, Singhal P, Corso J, Krovi V (2014) Атрибуты хирургического инструмента из монокулярного видео. В: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp 4887–4892

Lahane A, Yesha Y, Grasso MA, Joshi A, Martineau J, Mokashi R, Chapman D, Grasso MA, Brady M , Йеша Й и др. (2011) Обнаружение небезопасных действий с помощью видео лапароскопической холецистэктомии. В: Материалы Международного симпозиума по информатике здравоохранения ACM SIGHIT, том 47, стр. 114–122
Lalys F, Jannin P (2014) Моделирование хирургического процесса: обзор. Int J Comput Assist Radiol Surg 9 (3): 495–511
Статья Google ученый
Lalys F, Riffaud L, Morandi X, Jannin P (2011) Определение хирургических фаз по видео с микроскопа путем комбинирования SVM и HMM. В: Материалы Международной конференции MICCAI 2010 г. «Медицинское компьютерное зрение: методы распознавания и приложения в медицинской визуализации», MCV’10. Springer, pp 54–62
Springer, pp 54–62
Laranjo I, Braga J, Assunção D, Silva A, Rolanda C, Lopes L, Correia-Pinto J, Alves V (2013) Интернет-решение для сбора, обработки, архивирования и распространения эндоскопических исследований. В: Распределенные вычисления и искусственный интеллект, вып. 217 в AISC, стр. 317–324. Springer
Lau WY, Leow CK, Li AKC (1997) История эндоскопической и лапароскопической хирургии. World J Surg 21 (4): 444–453
Статья Google ученый
Lee J, Oh J, Shah SK, Yuan X, Tang SJ (2007) Автоматическая классификация органов пищеварения в видео с беспроводной капсульной эндоскопией. В: Proce. конкурса 2007 ACM Symp. по прикладным вычислениям, SAC ’07. ACM, pp 1041–1045
по прикладным вычислениям, SAC ’07. ACM, pp 1041–1045
Lee SL, Lerotic M, Vitiello V, Giannarou S, Kwok KW, Visentini-Scarzanella M, Yang GZ (2010) От медицинских изображений до минимально инвазивного вмешательства: компьютерная помощь для роботизированной хирургии . Comput Med Imaging Graph 34 (1): 33–45
Статья Google ученый
Leong JJ, Nicolaou M, Atallah L, Mylonas GP, Darzi AW, Yang GZ (2006) HMM-оценка качества траектории движения в лапароскопической хирургии. В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2006, стр 752–759. Springer
Лещук М.И., Дюплага М. (2011) Алгоритм видеообзора процедур бронхоскопии. Интернет-магазин BioMedical Engineering 10 (1): 110
Интернет-магазин BioMedical Engineering 10 (1): 110
Статья Google ученый
Li B, Meng MH (2012) Распознавание опухоли в изображениях беспроводной капсульной эндоскопии с использованием текстурных характеристик и выбора функций на основе SVM. IEEE Trans Inf Technol Biomed 16 (3): 323–329
Статья Google ученый
Li B, Meng MH (2009) Компьютерное обнаружение кровоточащих областей для изображений капсульной эндоскопии. IEEE Trans Biomed Eng 56 (4): 1032–1039
Статья Google ученый
Liao H, Tsuzuki M, Mochizuki T, Kobayashi E, Chiba T, Sakuma I (2009) Быстрое отображение мозаики эндоскопических изображений с трехмерным ультразвуковым изображением для внутриматочной хирургии плода. Минимально инвазивная терапия и родственные технологии: MITAT: официальный журнал Общества минимально инвазивной терапии 18 (6): 332–340
Минимально инвазивная терапия и родственные технологии: MITAT: официальный журнал Общества минимально инвазивной терапии 18 (6): 332–340
Статья Google ученый
Ляо Р., Чжан Л., Сунь И, Мяо С., Chefd’hotel C (2013) Обзор последних достижений в методах регистрации, применяемых в минимально инвазивной терапии.IEEE Trans Multimedia 15 (5): 983–1000
Статья Google ученый
Liedlgruber M, Uhl A (2011) Компьютерные системы поддержки принятия решений для эндоскопии в желудочно-кишечном тракте: обзор. IEEE Rev Biomed Eng 4: 73–88
Статья Google ученый
 org/ScholarlyArticle»> 123.
org/ScholarlyArticle»> 123.Liedlgruber M, Uhl A, Vecsei A (2011) Статистический анализ влияния искажения (коррекции) на автоматизированную классификацию целиакии.В: 2011 17-я Международная конференция. on Digital Signal Processing, pp 1–6
Lin HC, Shafran I, Yuh D, Hager GD (2006) На пути к автоматической оценке навыков: обнаружение и сегментация хирургических движений с помощью роботов. Компьютерная хирургия 11 (5): 220–230
Статья Google ученый
Liu D, Cao Y, Kim KH, Stanek S, Doungratanaex-Chai B, Lin K, Tavanapong W, Wong J, Oh J, de Groen PC (2007) Arthemis: программное обеспечение для аннотирования в интегрированном захвате и система анализа для колоноскопии.Компьютерные методы Prog Biomed 88 (2): 152–163
Статья Google ученый
 org/ScholarlyArticle»> 126.
org/ScholarlyArticle»> 126.Лю Д., Цао Й., Таванапонг В., Вонг Дж., О Дж. Х., де Гроен ПК (2007) Гистограмма покрытия квадрантов: новый метод измерения качества колоноскопических процедур. В: 29-я Ежегодная международная конференция Общества инженеров в медицине и биологии IEEE, 2007. EMBS 2007, стр. 3470–3473
Lo B, Scarzanella MV, Stoyanov D, Yang GZ (2008) Распространение убеждений для определения глубины. Fusion в минимально инвазивной хирургии.В: MICCAI 2008, нет. 5242 в LNCS, стр. 104–112. Springer
Локоч Дж, Шеффманн К., дель Фабро М. (2015) Динамическая иерархическая визуализация ключевых кадров в эндоскопическом видео. В: Мультимедийное моделирование, вып. 8936 в LNCS, стр. 291–294. Springer
 org/ScholarlyArticle»> 129.
org/ScholarlyArticle»> 129.Loukas C, Georgiou E (2015) Обнаружение дыма в видеороликах по эндоскопической хирургии: первый шаг к извлечению семантических событий. Int J Med Rob Comput Assisted Surg 11 (1): 80–94
Статья Google ученый
Lowe DG (2004) Отличительные особенности изображения от масштабно-инвариантных ключевых точек. Int J Comput Vis 60 (2): 91–110
Статья Google ученый
Луо X, Feuerstein M, Deguchi D, Kitasaka T, Takabatake H, Mori K (2012) Разработка и сравнение нового гибридного отслеживания движения для бронхоскопической навигации. Med Image Anal 16 (3): 577–596
Статья Google ученый
 org/ScholarlyArticle»> 132.
org/ScholarlyArticle»> 132.Lux M, Marques O, Schöffmann K, Böszörmenyi L, Lajtai G (2009) Новый инструмент для обобщения артроскопических видео. Мультимедийные инструменты и приложения 46 (2–3): 521–544
Статья Google ученый
Lux M, Riegler M (2013) Аннотации эндоскопических видео на мобильных устройствах: восходящий подход. В: Материалы 4-й конференции ACM Multimedia Systems. ACM, pp. 141–145
Mackiewicz M, Berens J, Fisher M (2008) Сегментация цветного видео для беспроводной капсульной эндоскопии.IEEE Trans Med Imaging 27 (12): 1769–1781
Статья Google ученый

Maghsoudi O, Talebpour A, Sotanian-Zadeh H, Alizadeh M, Soleimani H (2014) Обнаружение информативных и неинформативных областей в кадрах WCE Journal of Advanced Computing
Maier-Phein L, Mount , Bartoli A, Elhawary H, Elson D, Groch A, Kolb A, Rodrigues M, Sorger J, Speidel S, Stoyanov D (2013) Оптические методы трехмерной реконструкции поверхности в компьютерной лапароскопической хирургии.Med Image Anal 17 (8): 974–996
Статья Google ученый
Макари М.А. (2013) Сила видеозаписи: вывод качества на новый уровень. JAMA 309 (15): 1591
Артикул Google ученый
Malti A (2014) Вариационная формулировка квазиконформной формы на основе шаблона на основе лапароскопических изображений Int’l Journal of Advanced Computer Science and Applications (IJACSA)
 org/ScholarlyArticle»> 139.
org/ScholarlyArticle»> 139.Мальти А., Бартоли А. (2014) Сочетание конформной деформации и затенения Кука-Торранса для трехмерной реконструкции в лапароскопии. IEEE Trans Biomed Eng 61 (6): 1684–1692
Статья Google ученый
Marayong P, Li M, Okamura A, Hager G (2003) Ограничения пространственного движения: теория и демонстрации для управления роботом с использованием виртуальных приспособлений. В: Международная конференция IEEE по робототехнике и автоматизации, 2003. Труды. ICRA ’03, vol 2, pp 1954–1959
Markelj P, Tomazevic D, Likar B, Pernuš F (2012) Обзор методов регистрации 3D / 2d для вмешательств под визуальным контролем. Med Image Anal 16 (3): 642–661
Статья Google ученый
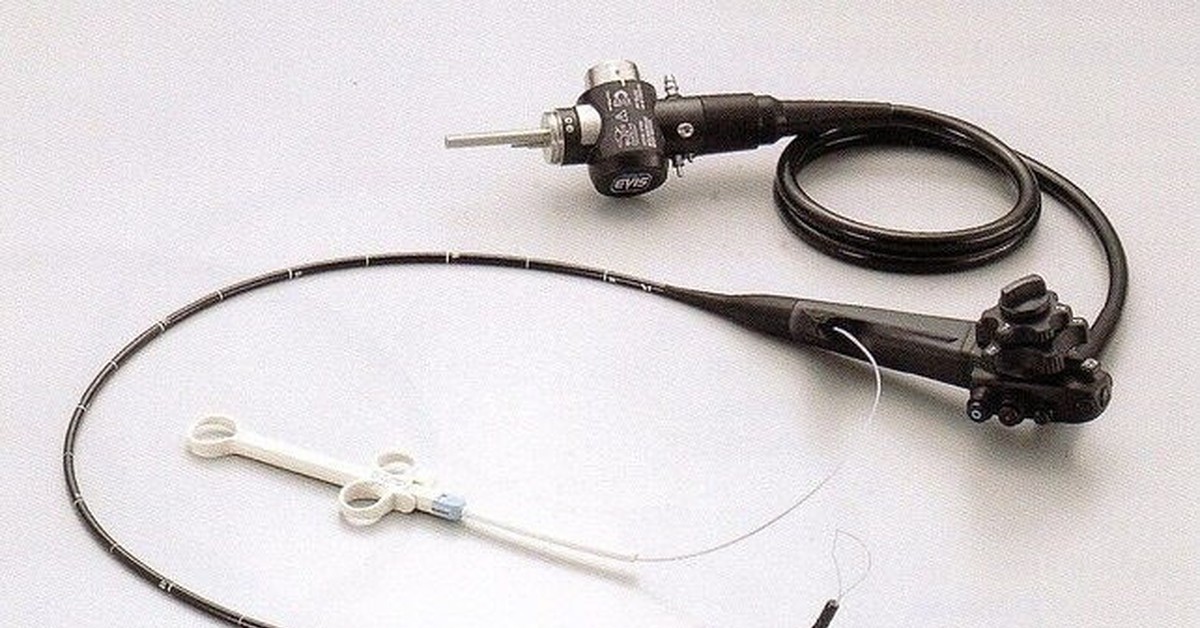 org/ScholarlyArticle»> 142.
org/ScholarlyArticle»> 142.Matas J, Chum O, Urban M, Pajdla T (2004) Устойчивое стереозвук с широкой базой из максимально стабильных экстремальных регионов. Изображение Vis Comput 22 (10): 761–767
Статья Google ученый
Meslouhi O, Kardouchi M, Allali H, Gadi T, Benkaddour YA (2011) Автоматическое обнаружение и раскрашивание зеркальных отражений для кольпоскопических изображений. Центральноевропейский журнал компьютерных наук 1 (3): 341–354
Google ученый
Миранда-Луна Р., Даул С., Блондель В., Эрнандес-Майер Й, Вольф Д., Гийемин Ф. (2008) Мозаичное изображение последовательностей эндоскопических изображений мочевого пузыря: алгоритм калибровки и регистрации искажений. IEEE Transactions по биомедицинской инженерии 55 (2): 541–553
Статья Google ученый
 org/ScholarlyArticle»> 145.
org/ScholarlyArticle»> 145.Mirota D, Wang H, Taylor R, Ishii M, Hager G (2009) К видео-навигации для эндоскопической эндоназальной хирургии основания черепа. MICCAI 2009: 91–99
Google ученый
Mirota DJ, Ishii M, Hager GD (2011) Навигация на основе зрения в вмешательствах с визуальным контролем. Annu Rev Biomed Eng 13 (1): 297–319
Статья Google ученый
Mirota DJ, Uneri A, Schafer S, Nithiananthan S, Reh DD, Gallia GL, Taylor RH, Hager GD, Siewerdsen JH (2011) высокоточная регистрация эндоскопического видео на основе трехмерного изображения на C-дугу конусно-лучевая компьютерная томография для хирургии основания черепа под визуальным контролем.В: Серия конференций Общества инженеров по фотооптическому приборостроению (SPIE), том 7964, стр. 79640J
79640J
Münzer B, Schoeffmann K, Böszörmenyi L (2016) Сжатие видео в зависимости от предметной области для долгосрочного архивирования данных эндоскопической хирургии Ролики. В: 29-й Международный симпозиум IEEE по компьютерным медицинским системам (CBMS), 2016 г., стр. 312–317. DOI: 10.1109 / CBMS.2016.28.00000
Moll M, Koninckx T, Van Gool LJ, Koninckx PR (2009) Невращающиеся изображения при лапароскопии с приложением для лапароскопов 30 °.В: 4-я Европейская конференция международной федерации медицинской и биологической инженерии. Springer, pp 966–969
Mountney P, Lo B, Thiemjarus S, Stoyanov D, Yang GZ (2007) Вероятностная основа для отслеживания деформируемых мягких тканей в минимально инвазивной хирургии. MICCAI 2007: 34–41
MICCAI 2007: 34–41
Google ученый
Маунтни П., Стоянов Д., Ян Г.З. Восстановление деформации тканей и движения лапароскопа для малоинвазивной хирургии.Учебная бумага. http://www.mountney.org.uk/publications/SPM%202010.pdf
Маунтни П., Стоянов Д., Ян Г.З. (2010) Восстановление и отслеживание трехмерной деформации ткани. IEEE Signal Process Mag 27 (4): 14–24
Статья Google ученый
Mountney P, Yang GZ (2009) Расширение динамического обзора для малоинвазивной хирургии с использованием одновременной локализации и картирования. В: Ежегодная международная конференция Общества инженеров IEEE в медицине и биологии, EMBC 2009, стр. 1184–1187
1184–1187
Mountney P, Yang GZ (2010) SLAM с компенсацией движения для хирургии под визуализацией. Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2010: 496–504
Статья Google ученый
Mountney P, Yang GZ (2012) Контекстно-зависимые дескрипторы для отслеживания деформируемой ткани. Med Image Anal 16 (3): 550–561
Статья Google ученый
Moustris GP, Hiridis SC, Deliparaschos KM, Konstantinidis KM (2011) Эволюция автономных и полуавтономных роботизированных хирургических систем: обзор литературы.Int J Med Rob Comput Assisted Surg 7 (4): 375–392
Статья Google ученый
Müller H, Michoux N, Bandon D, Geissbuhler A (2004) Обзор контентно-ориентированных систем поиска изображений в медицинских приложениях — клинические преимущества и будущие направления. Int J Med Inform 73 (1): 1–23
Статья Google ученый
Münzer B (2011) Требования и прототипы для системы управления эндоскопическим видео на основе контента.Дипломная работа. Alpen-Adria Universität Klagenfurt, Клагенфурт
Google ученый
Münzer B, Schoeffmann K, Böszörmenyi L (2013) Обнаружение круглой области содержимого в эндоскопических видео. В: 26-й международный симпозиум IEEE, 2013 г. on Computer-Based Medical Systems (CBMS), pp 534–536
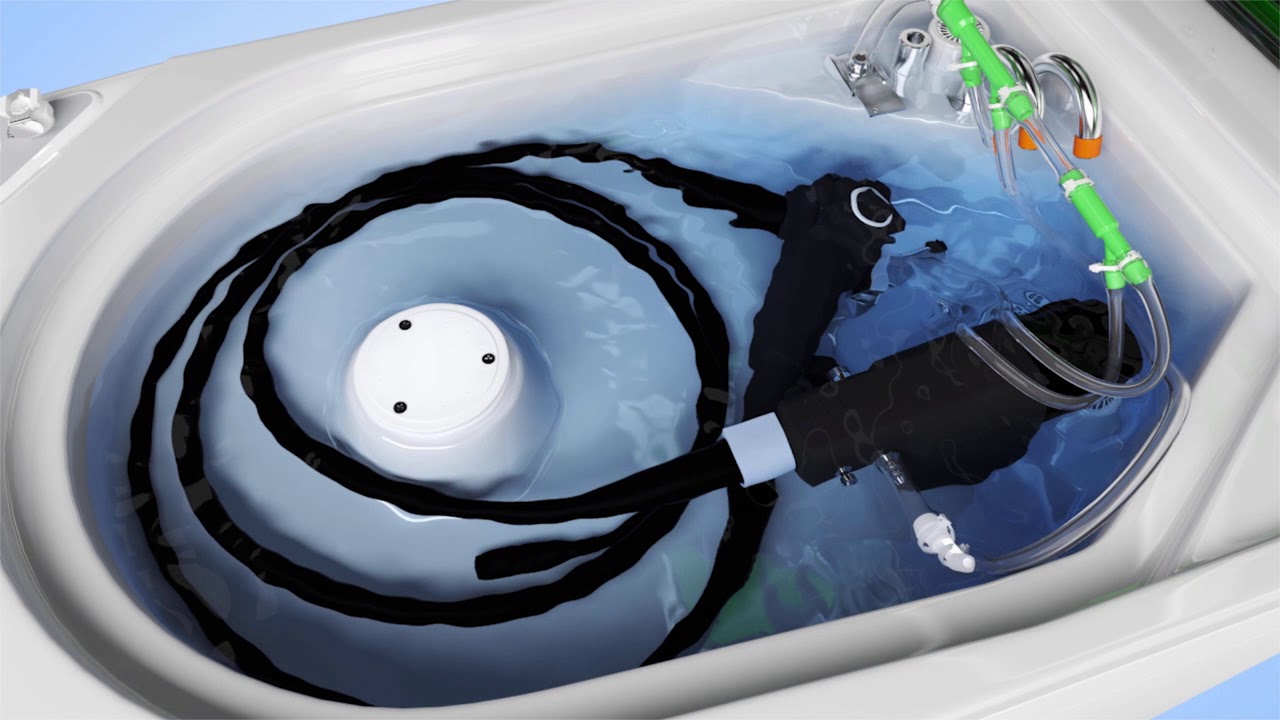 org/ScholarlyArticle»> 160.
org/ScholarlyArticle»> 160.Münzer B, Schoeffmann K, Böszörmenyi L (2013) Повышение эффективности кодирования эндоскопических видео с помощью наложения границ на основе кругового обнаружения.В: IEEE International Conference on Multimedia and Expo Workshops (ICMEW), 2013, стр. 1–4
Münzer B, Schoeffmann K, Böszörmenyi L (2013) Актуальная сегментация лапароскопических видео. В: 2013 IEEE International Symposium on Multimedia (ISM), pp. 84–91
Münzer B, Schoeffmann K, Böszörmenyi L, Smulders J, Jakimowicz J (2014) Исследование влияния сжатия на качество восприятия Лапароскопические видео. В: 2014 IEEE 27-й Международный симпозиум по компьютерным медицинским системам einfarbig (CBMS), стр. 153–158
 org/ScholarlyArticle»> 163.
org/ScholarlyArticle»> 163.Muthukudage J, Oh J, Nawarathna R, Tavanapong W., Wong J, de Groen PC (2014) Быстрое обнаружение объектов с использованием цветовых функций для измерения качества колоноскопии. В: Abdomen and Thoracic Imaging, pp 365–388. Springer
Muthukudage J, Oh J, Tavanapong W, Wong J, de Groen PC (2012) Определение области стула на основе цвета в видео колоноскопии для измерения качества. В: Достижения в области технологий изображения и видео, № 7087 в LNCS, стр 61–72. Springer
Nageotte F, Zanne P, Doignon C, de Mathelin M (2006) Эндоскопический путь на основе визуального сервоуправления, следующий для роботизированной лапароскопической хирургии.В: Международная конференция IEEE / RSJ по интеллектуальным роботам и системам, 2006, стр. 2364–2369
 org/ScholarlyArticle»> 166.
org/ScholarlyArticle»> 166.Neumuth T, Jannin P, Schlomberg J, Meixensberger J, Wiedemann P, Burgert O (2011) Анализ популяций хирургических вмешательств с использованием общие модели хирургического процесса. Int J Comput Assist Radiol Surg 6 (1): 59–71
Статья Google ученый
Николау С., Солер Л., Муттер Д., Мареско Дж. (2011) Дополненная реальность в лапароскопической хирургической онкологии.Хирургия Онкол 20 (3): 189–201
Артикул Google ученый
Oh J, Hwang S, Cao Y, Tavanapong W., Liu D, Wong J, de Groen P (2009) Измерение объективного качества колоноскопии. IEEE Trans Biomed Eng 56 (9): 2190–2196
Статья Google ученый
 org/ScholarlyArticle»> 169.
org/ScholarlyArticle»> 169.Oh J, Hwang S, Lee J, Tavanapong W, Wong J, de Groen PC (2007) Информационная классификация кадров для видео эндоскопии.Med Image Anal 11 (2): 110–127
Статья Google ученый
Oh JH, Rajbal MA, Muthukudage JK, Tavanapong W., Wong J, de Groen PC (2009) Обнаружение границы фаз в реальном времени в видео колоноскопии. В: ISPA 2009. Труды 6-го Международного симпозиума по обработке и анализу изображений и сигналов, 2009 г., стр. 724–729
Google ученый
Окатани Т., Дегучи К. (1997) Реконструкция формы из изображения эндоскопа по форме с помощью техники затенения для точечного источника света в центре проецирования.Comput Vis Image Underst 66 (2): 119–131
Статья Google ученый
 org/ScholarlyArticle»> 172.
org/ScholarlyArticle»> 172.Oropesa I, Sánchez-González P, Chmarra MK, Lamata P, Fernández A, Sánchez-Margallo JA, Jansen FW, Dankelman J, Sánchez-Margallo FM, Gómez Lap Tracking Instrument: EJaros (2013) по эндоскопическому видеоанализу для оценки психомоторных навыков. Surg Endosc 27 (3): 1029–1039
Артикул Google ученый
Oropesa I, Sánchez-González P, Lamata P, Chmarra MK, Pagador JB, Sánchez-Margallo JA, Sánchez-Margallo FM, Gómez EJ (2011) Методы и инструменты для объективной оценки психомоторных навыков в лапароскопической хирургии. J Surg Res 171 (1): e81 – e95
Артикул Google ученый
Padoy N, Blum T, Ahmadi SA, Feussner H, Berger MO, Navab N (2012) Статистическое моделирование и распознавание хирургического рабочего процесса. Med Image Anal 16 (3): 632–641
Med Image Anal 16 (3): 632–641
Статья Google ученый
Padoy N, Hager G (2011) Человеко-машинная совместная хирургия с использованием изученных моделей. В: Международная конференция IEEE по робототехнике и автоматизации (ICRA), 2011 г., стр. 5285–5292
Parchami M, Mariottini GL (2014) Сравнительное исследование трехмерной стерео реконструкции по эндоскопическим изображениям. В: Proceedings 7th Int’l Conf. по распространенным технологиям, связанным с вспомогательными средами, стр. 25. ACM
Park S, Howe RD, Torchiana DF (2001) Виртуальные приспособления для роботизированной кардиохирургии.В: MICCAI 2001, нет. 2208 в LNCS, стр. 1419–1420. Springer
1419–1420. Springer
Parot V, Lim D, González G, Traverso G, Nishioka NS, Vakoc BJ, Durr NJ (2013) Фотометрическая стереоэндоскопия. J Biomed Opt 18 (7): 076,017–076,017
Статья Google ученый
Penne J, Höller K, Stürmer M, Schrauder T, Schneider A, Engelbrecht R, Feußner H, Schmauss B, Hornegger J (2009) Time-of-Flight 3-D Endoscopy. В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2009, no.5761 в LNCS, стр. 467–474. Springer
Pezzementi Z, Voros S, Hager G (2009) Отслеживание сочлененных объектов путем визуализации частей с единообразным внешним видом. В: IEEE International Conference on Robotics and Automation, 2009. ICRA ’09, pp 3940–3947
ICRA ’09, pp 3940–3947
Prasath V, Figueiredo I, Figueiredo P, Palaniappan K (2012) Обнаружение слизистой оболочки и трехмерная реконструкция в беспроводной капсульной эндоскопии видео с использованием активных контуров. В: Ежегодная международная конференция IEEE Engineering in Medicine and Biology Society (EMBC) 2012 г., стр. 4014–4017
Primus MJ, Schoeffmann K, Böszörmenyi L (2013) Сегментация записанных эндоскопических видео путем обнаружения значительных изменений движения. В: 11th International Workshop on Content-Based Multimedia Indexing (CBMI), стр 223–228
Primus MJ, Schoeffmann K, Böszörmenyi L (2015) Классификация инструментов в лапароскопических видео. В: 2015 13-й Международный семинар по индексированию мультимедиа на основе контента (CBMI). Прага
В: 2015 13-й Международный семинар по индексированию мультимедиа на основе контента (CBMI). Прага
Primus MJ, Schoeffmann K, Böszörmenyi L (2016) Временная сегментация лапароскопических видео на хирургические фазы.В: 14th International Workshop on Content-Based Multimedia Indexing (CBMI), 2016, pp 1–6. DOI: 10.1109 / CBMI.2016.7500249
Przelaskowski A, Jozwiak R (2008) Сжатие видео о бронхоскопии: оценка полезности и эффективности кодирования. В кн .: Информационные технологии в биомедицине, вып. 47 в «Успехах в мягких вычислениях», стр. 208–216. Springer
Пуэрто Г.А., Мариоттини Г.Л. (2012) Сравнительное исследование алгоритмов поиска соответствий в изображениях MIS.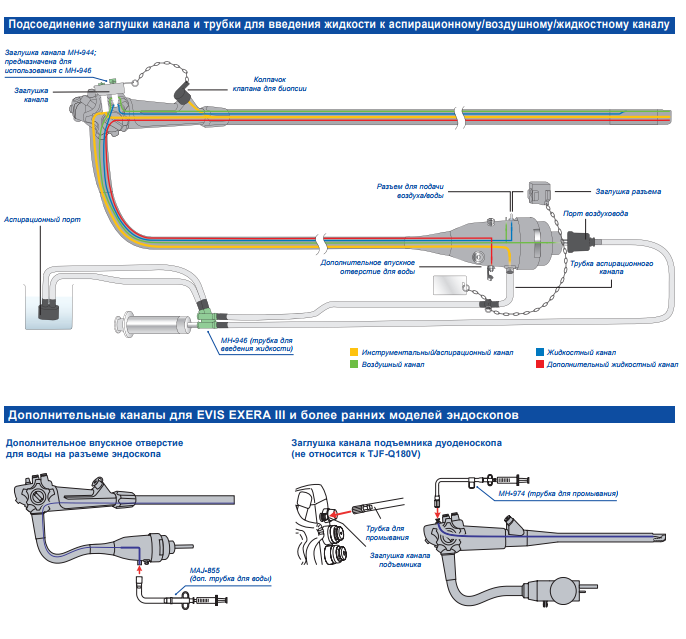 В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2012, no. 7511 в LNCS, стр. 625–633. Springer
В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2012, no. 7511 в LNCS, стр. 625–633. Springer
Пуэрто-Соуза Г., Мариоттини Г.Л. (2013) Быстрый и точный алгоритм сопоставления признаков для минимально инвазивных эндоскопических изображений. IEEE Trans Med Imaging 32 (7): 1201–1214
Статья Google ученый
Пуэрто-Соуза, Джорджия, Мариоттини Г.Л. (2014) Согласование плотных характеристик с широким базовым уровнем для эндоскопических изображений.В: Технология изображения и видео, № 8333 в LNCS, стр. 48–59. Springer
Rangseekajee N, Phongsuphap S (2011) Классификация видеокадров эндоскопии с использованием анализа информации по краям. In: Computing in Cardiology, 2011, pp. 549–552
In: Computing in Cardiology, 2011, pp. 549–552
Reeff M, Gerhard F, Cattin PC, Székely G (2006) Мозаичное изображение эндоскопических изображений плаценты. GI Jahrestagung 2006 (1): 467–474
Google ученый
Reiter A, Allen PK, Zhao T (2014) Обучение внешнему виду для трехмерного отслеживания роботизированных хирургических инструментов. Int J Robot Res 33 (2): 342–356
Статья Google ученый
Richa R, Bó APL, Poignet P (2011) На пути к надежному трехмерному визуальному отслеживанию для компенсации движения при кардиохирургии. Med Image Anal 15 (3): 302–315
Статья Google ученый
 org/ScholarlyArticle»> 193.
org/ScholarlyArticle»> 193.Riegler M, Lux M, Gridwodz C, Spampinato C, de Lange T, Eskeland SL, Pogorelov K, Tavanapong W, Schmidt PT, Gurrin C, Johansen D, Johansen HA, Halvorsen PA (2016) Мультимедиа и Медицина: товарищи по команде для лучшего обнаружения заболеваний и выживания.В: Proceedings of the ACM on Multimedia Conference, 2016, MM ’16, pp 968–977. ACM, Нью-Йорк, Нью-Йорк, США. 00000. DOI: 10.1145 / 2964284.2976760
Röhl S, Bodenstedt S, Suwelack S, Kenngott H, Müller-Stich BP, Dillmann R, Speidel S (2012) Плотная реконструкция поверхности с использованием графического процессора на основе стереоэндоскопических изображений для интраоперационной регистрации. Med Phys 39 (3): 1632–1645
Статья Google ученый

Roldan Carlos J, Lux M, Giro-i Nieto X, Munoz P, Anagnostopoulos N (2015) Поиск визуальной информации в эндоскопических видеоархивах. В: 2015 13-й Международный семинар по контент-ориентированной индексации мультимедиа (CBMI), стр. 1–6
Rosen J, Brown J, Chang L, Sinanan M, Hannaford B (2006) Обобщенный подход к моделированию минимально инвазивной хирургии как случайный процесс с использованием дискретной марковской модели. IEEE Trans Biomed Eng 53 (3): 399–413
Статья Google ученый
Rosen J, Hannaford B, Richards C, Sinanan M (2001) Марковское моделирование минимально инвазивной хирургии на основе взаимодействия инструмента / ткани и характеристик силы / крутящего момента для оценки хирургических навыков. IEEE Trans Biomed Eng 48 (5): 579–591
Статья Google ученый
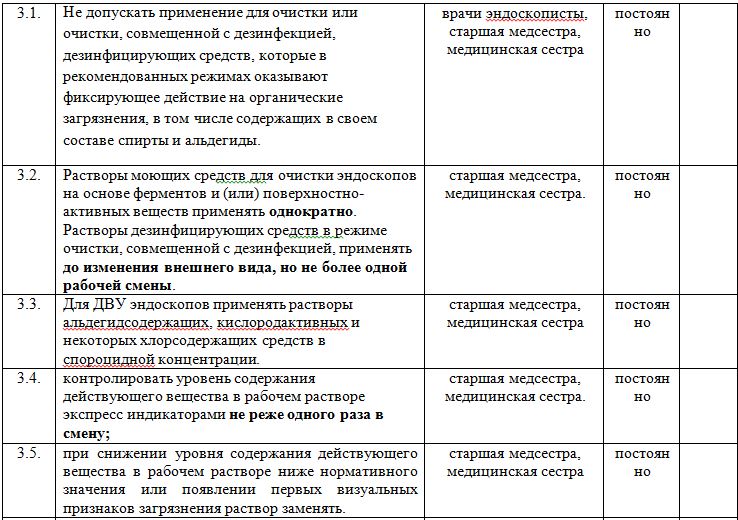 org/ScholarlyArticle»> 198.
org/ScholarlyArticle»> 198.Rublee E, Rabaud V, Konolige K, Bradski G (2011) ORB: эффективная альтернатива SIFT или SURF. В: 2011 IEEE International Conference on Computer Vision (ICCV), pp 2564–2571
Rungseekajee N, Lohvithee M, Nilkhamhang I (2009) Метод классификации информационных кадров для анализа видео колоноскопии в реальном времени. В: 6-я Международная конференция по электротехнике / электронике, компьютерам, телекоммуникациям и информационным технологиям, 2009 г., ECTI-CON 2009, том 2, стр. 1076–1079
Rupp S, Elter M, Winter C (2007 ) Повышение точности извлечения признаков для гибкой калибровки эндоскопа с помощью пространственного суперразрешения. В: 29-я ежегодная международная конференция общества инженеров IEEE в медицине и биологии, 2007 г.EMBS 2007, pp 6565–6571
 org/ScholarlyArticle»> 201.
org/ScholarlyArticle»> 201.Saint-Pierre CA, Boisvert J, Grimard G, Cheriet F (2011) Обнаружение и коррекция зеркальных отражений для автоматической сегментации хирургическим инструментом на торакоскопических изображениях. Mach Vis Appl 22 (1): 171–180
Статья Google ученый
Sauvée M, Noce A, Poignet P, Triboulet J, Dombre E (2007) Трехмерная оценка движения сердца с использованием эндоскопической системы монокулярного зрения: от искусственных ориентиров до анализа текстуры.Biomed Signal Process Control 2 (3): 199–207
Статья Google ученый
Scharcanski J, Gaviao W (2006) Иерархическое обобщение видео диагностической гистероскопии. В: 2006 IEEE International Conference on Image Processing, pp 129–132
 org/ScholarlyArticle»> 204.
org/ScholarlyArticle»> 204.Schoeffmann K, del Fabro M, Szkaliczki T., Böszörmenyi L, Keckstein J (2014) Извлечение ключевых кадров в эндоскопическом видео. Мультимедийные инструменты и приложения: 1–20
Selka F, Nicolau S, Agnus V, Bessaid A, Marescaux J, Soler L (2015) Контекстно-зависимый выбор алгоритмов для рекурсивного отслеживания признаков в эндоскопическом изображении с использованием новой методологии. Comput Med Imaging Graph 40: 49–61
Статья Google ученый
Шен Й, Гутуру П., Пряжки B (2012) Сегментация видео по беспроводной капсульной эндоскопии с использованием подхода неконтролируемого обучения на основе вероятностного латентно-семантического анализа с масштабно-инвариантными функциями.IEEE Trans Inf Technol Biomed 16 (1): 98–105
Статья Google ученый
 org/ScholarlyArticle»> 207.
org/ScholarlyArticle»> 207.Шерайзин С., Шераизин В. (2006) Интеллектуальное улучшение контрастности эндоскопической визуализации. В: 27-я ежегодная международная конференция общества инженерии в медицине и биологии, 2005 г., IEEE-EMBS 2005. pp 6551–6554
Shih T, Chang RC (2005) Цифровое рисование — обзор и рисование многослойных изображений алгоритмы. В: Третья международная конференция.по информационным технологиям и приложениям, 2005. ICITA 2005, vol 1, pp 15–24
Sielhorst T, Feuerstein M, Navab N (2008) Продвинутые медицинские дисплеи: обзор литературы по дополненной реальности. J Disp Technol 4 (4): 451–467
Артикул Google ученый
 org/ScholarlyArticle»> 210.
org/ScholarlyArticle»> 210.Simpfendörfer T, Baumhauer M, Müller M, Gutt CN, Meinzer HP, Rassweiler JJ, Guven S, Teber D (2011) Визуализация дополненной реальности во время лапароскопической радикальной простатэктомии.J Endourol 25 (12): 1841–1845
Статья Google ученый
Song KT, Chen CJ (2012) Автономное и стабильное отслеживание инструментов эндоскопов с помощью монокулярной камеры. В: 2012 IEEE / ASME Int’l Conf. on Advanced Intelligent Mechatronics (AIM), pp. 39–44
Soper TD, Porter MP, Seibel EJ (2012) Поверхностная мозаика мочевого пузыря, восстановленная из эндоскопического видео для автоматизированного наблюдения. IEEE Trans Biomed Eng 59 (6): 1670–1680
Статья Google ученый
 org/ScholarlyArticle»> 213.
org/ScholarlyArticle»> 213.Speidel S, Benzko J, Krappe S, Sudra G, Azad P, Müller-Stich BP, Gutt C, Dillmann R (2009) Автоматическая классификация минимально инвазивных инструментов на основе последовательностей эндоскопических изображений. В: Серия конференций Общества инженеров по фотооптическому приборостроению (SPIE), том 7261, стр. 72610A
Speidel S, Sudra G, Senemaud J, Drentschew M, Müller-Stich BP, Gutt C, Dillmann R (2008 ) Распознавание ситуаций риска на основе отслеживания эндоскопических инструментов и моделирования ситуаций на основе знаний.В: Конференция Общества инженеров по фотооптическому приборостроению (SPIE). Series, vol 6918, p 69180X
Spyrou E, Diamantis D, Iakovidis D (2013) Панорамные визуальные сводки для эффективного чтения видео капсульной эндоскопии. В: 2013 8-й Международный семинар по адаптации и персонализации семантических и социальных сетей (SMAP), стр. 41–46
В: 2013 8-й Международный семинар по адаптации и персонализации семантических и социальных сетей (SMAP), стр. 41–46
Сринивасан Н., Станек С., Шевчински М.Дж., Эндерс Ф., Таванапонг В., О Дж, Вонг Дж., Гроен PCD (2013) Автоматическая обратная связь в режиме реального времени во время колоноскопии улучшает технику эндоскописта, как и предполагалось: контролируемое клиническое испытание.Гастроинтест Endosc 77 (5): AB500. 00000
Артикул Google ученый
Stanek SR, Tavanapong W, Wong J, Oh JH, De Groen PC (2012) Автоматическое обнаружение эндоскопических процедур в реальном времени с использованием временных функций. Comput Methods Prog Biomed 108 (2): 524–535
Статья Google ученый
 org/ScholarlyArticle»> 218.
org/ScholarlyArticle»> 218.Stanek SR, Tavanapong W, Wong JS, Oh J, de Groen PC (2008) Автоматический захват и сегментация эндоскопического видео в реальном времени.В: Серия конференций Общества инженеров фотооптического приборостроения (SPIE), том 6919, стр. 69190X
Staub C, Lenz C, Panin G, Knoll A, Bauernschmitt R (2010) Поддерживается отслеживание хирургических инструментов на основе контура кинематическим предсказанием. В: 2010 3-я Международная конференция IEEE РАН и EMBS по биомедицинской робототехнике и биомехатронике (BioRob), стр. 746–752
Staub C, Osa T, Knoll A, Bauernschmitt R (2010) Автоматизация прокалывания тканей с помощью круговых игл и руководство по зрению для компьютерной лапароскопической хирургии.В: IEEE International Conference on Robotics and Automation (ICRA), 2010, pp 4585–4590
 org/ScholarlyArticle»> 221.
org/ScholarlyArticle»> 221.Stauder R, Okur A, Peter L, Schneider A, Kranzfelder M, Feussner H, Navab N (2014) Random Forests для обнаружения фазы в анализе хирургического рабочего процесса. В кн .: Обработка информации в компьютерных вмешательствах, вып. 8498 в LNCS, стр. 148–157. Springer
Stehle T (2006) Удаление зеркальных отражений на эндоскопических изображениях. Acta Polytechnica: Journal of Advanced Engineering 46 (4): 32–36
Google ученый
Stehle T, Hennes M, Gross S, Behrens A, Wulff J, Aach T (2009) Коррекция динамических искажений для эндоскопических систем со сменной оптикой. В: Bildverarbeitung für die Medizin 2009, Informatik aktuell, стр. 142–146. Springer
 org/ScholarlyArticle»> 224.
org/ScholarlyArticle»> 224.Стоянов Д., Милонас Г.П., Делиджианни Ф., Дарзи А., Ян Г.З. (2005) Отслеживание движения мягких тканей и оценка структуры для роботизированных процедур MIS. В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2005, no. 3750 в LNCS, стр. 139–146.Springer
Стоянов Д., Скарзанелла М.В., Пратт П., Ян Г.З. (2010) Реконструкция стерео в реальном времени в минимально инвазивной хирургии с использованием роботов. В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2010, № 2, с. 6361 в LNCS, стр. 275–282. Springer
Стоянов Д., Ян Г.З. (2005) Удаление компонентов зеркального отражения для роботизированной лапароскопической хирургии. В: Международная конференция IEEE по обработке изображений, 2005. ICIP 2005, том 3, стр. III – 632–5
III – 632–5
Su LM, Vagvolgyi BP, Agarwal R, Reiley CE, Taylor R, Hager GD (2009) Дополненная реальность во время роботизированной лапароскопической частичной нефрэктомии: к 3D-КТ в реальном времени для регистрации стереоскопического видео. Урология 73 (4): 896–900
Статья Google ученый
Sudra G, Speidel S, Fritz D, Müller-Stich BP, Gutt C, Dillmann R (2007) MEDIASSIST: медицинская помощь для интраоперационной передачи навыков в минимально инвазивной хирургии с использованием дополненной реальности.В: Серия конференций Общества инженеров фотооптического приборостроения (SPIE), том 6509, стр. 65091O
Сугимото М. , Ясуда Х., Кода К., Сузуки М., Ямадзаки М., Тэдзука Т., Косуги С., Хигучи Р., Watayo Y, Yagawa Y, Uemura S, Tsuchiya H, Azuma T (2010) Навигация с наложением изображений с помощью безмаркерной регистрации поверхности в хирургии желудочно-кишечного тракта, гепатобилиарной и панкреатической хирургии. J Hepatobilary Pancreat Sci 17 (5): 629–636
, Ясуда Х., Кода К., Сузуки М., Ямадзаки М., Тэдзука Т., Косуги С., Хигучи Р., Watayo Y, Yagawa Y, Uemura S, Tsuchiya H, Azuma T (2010) Навигация с наложением изображений с помощью безмаркерной регистрации поверхности в хирургии желудочно-кишечного тракта, гепатобилиарной и панкреатической хирургии. J Hepatobilary Pancreat Sci 17 (5): 629–636
Статья Google ученый
Сунг Дж., Гилл И.С. (2001) Роботизированная лапароскопическая хирургия: сравнение систем да Винчи и Зевса. Урология 58 (6): 893–898
Статья Google ученый
Suwelack S, Röhl S, Dillmann R, Wekerle AL, Kenngott H, Müller-Stich B, Alt C, Speidel S (2012) Квадратичные коротированные конечные элементы для регистрации мягких тканей в реальном времени. В: Вычислительная биомеханика для медицины, стр. 39–50. Спрингер, Нью-Йорк
В: Вычислительная биомеханика для медицины, стр. 39–50. Спрингер, Нью-Йорк
Szczypiński P, Klepaczko A, Pazurek M, Daniel P (2014) Сегментация изображений на основе текстуры и цвета и обнаружение патологий в видео капсульной эндоскопии. Comput Methods Prog Biomed 113 (1): 396–411
Статья Google ученый
Тай XY, Ван Л.Д., Чен Кью, Фуджи Р., Кенджи К. (2009) Новый метод поиска медицинских изображений на основе коррелограммы цвета и текстуры и модели Gti. Int J Inf Technol Decis Mak 08 (02): 239–248
MATH Статья Google ученый
Тейлор Р. (2006) Перспектива медицинской робототехники. Proc IEEE 94 (9): 1652–1664
Proc IEEE 94 (9): 1652–1664
Статья Google ученый
Тейлор Р., Стоянович Д. (2003) Медицинская робототехника в компьютерно-интегрированной хирургии. IEEE Trans Robot Autom 19 (5): 765–781
Статья Google ученый
Тебер Д., Гювен С., Симпфендорфер Т., Баумхауэр М., Гювен Е.О., Йенсилек Ф., Гёзен А.С., Рассвайлер Дж. (2009) Дополненная реальность: новый инструмент для повышения хирургической точности при лапароскопической частичной нефрэктомии? Предварительные результаты in vitro и in vivo.Eur Urol 56 (2): 332–338
Статья Google ученый

Тиан Дж., Ма К.К. (2011) Обзор изображений сверхвысокого разрешения. SIViP 5 (3): 329–342
Статья Google ученый
Tjoa MP, Krishnan SM et al (2003) Извлечение признаков для анализа статуса толстой кишки из эндоскопических изображений. Онлайн биомедицинская инженерия 2 (9): 1–17
Google ученый
Tokgozoglu H, Meisner E, Kazhdan M, Hager G (2012) Цветная гибридная реконструкция для эндоскопии. В: 2012 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), pp 8–15
Google ученый
Tonet O, Thoranaghatte RU, Megali G, Dario P (2007) Отслеживание эндоскопических инструментов без локализатора: подход, основанный на анализе формы. Компьютерная хирургия: Официальный журнал Международного общества компьютерной хирургии 12 (1): 35–42
Компьютерная хирургия: Официальный журнал Международного общества компьютерной хирургии 12 (1): 35–42
Статья Google ученый
Totz J, Fujii K, Mountney P, Yang GZ (2012) Улучшенная визуализация для минимально инвазивной хирургии. Int J Comput Assist Radiol Surg 7 (3): 423–432
Статья Google ученый
Тотц Дж., Маунтни П., Стоянов Д., Ян Г.З. (2011) Реконструкция плотной поверхности для улучшенной навигации в MIS. В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2011, no. 6891 в LNCS, стр. 89–96. Спрингер
Цевас С., Яковидис Д.К., Марулис Д. , Павлакис Э. (2008) Автоматическое уменьшение кадра видео беспроводной капсульной эндоскопии. В: 8th IEEE International Conference on BioInformatics and BioEngineering, 2008. BIBE 2008, pp 1–6
, Павлакис Э. (2008) Автоматическое уменьшение кадра видео беспроводной капсульной эндоскопии. В: 8th IEEE International Conference on BioInformatics and BioEngineering, 2008. BIBE 2008, pp 1–6
Twinanda AP, Marescaux J, de Mathelin M, Padoy N (2015) Классификационный подход для автоматической организации базы данных лапароскопических видео. Int J Comput Assist Radiol Surg: 1–12
Twinanda AP, de Mathelin M, Padoy N (2014) Поиск границ задачи на основе ядра Фишера в лапароскопической базе данных с одним видео-запросом.В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2014, no. 8675 в LNCS, стр. 409–416. Springer
Укимура О., Гилл И. С. (2008) Эндоскопическая хирургия с использованием изображений: опыт клиники Кливленда. Journal of Endourology / Endourological Society 22 (4): 803–810
С. (2008) Эндоскопическая хирургия с использованием изображений: опыт клиники Кливленда. Journal of Endourology / Endourological Society 22 (4): 803–810
Статья Google ученый
Виджаян Асари К., Кумар С., Радхакришнан Д. (1999) Новый подход к коррекции нелинейных искажений в эндоскопических изображениях на основе оценки наименьших квадратов.IEEE Trans Med Imaging 18 (4): 345–354
Статья Google ученый
Виларино Ф., Спиридонос П., Пуйоль О., Витрия Дж., Радева П., де Иорио Ф. (2006) Автоматическое определение кишечных соков в беспроводной капсульной видеоэндоскопии. В: 18-я Международная конференция по распознаванию образов, 2006. ICPR 2006, том 4, стр. 719–722
 org/ScholarlyArticle»> 249.
org/ScholarlyArticle»> 249.Visentini-Scarzanella M, Mylonas GP, Stoyanov D, Yang GZ (2009) i-brush: A gaze- условная виртуальная кисть для плотной трехмерной реконструкции в роботизированной хирургии.В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2009, стр. 353–360. Springer
Vitiello V, Lee SL, Cundy T., Yang GZ (2013) Новые роботизированные платформы для минимально инвазивной хирургии. IEEE Rev Biomed Eng 6: 111–126
Статья Google ученый
Vogt F, Krüger S, Niemann H, Schick C (2003) Система для улучшения эндоскопических изображений в реальном времени. Вычисление медицинских изображений и компьютерное вмешательство-MICCAI 2003: 356–363
Google ученый
 org/ScholarlyArticle»> 252.
org/ScholarlyArticle»> 252.Фогт Ф, Паулюс Д., Хейгл Б., Фогельгсанг С., Ниманн Х., Грейнер Дж., Шик С. (2002) Создание невидимого видимым: замещение выделения с помощью цветных световых полей. Конференция по цвету в графических изображениях и зрении 2002 (1): 352–357
Google ученый
Vogt F, Paulus D, Niemann H (2002) Выделите замещение в световых полях. В: 2002 Международная конференция по обработке изображений. 2002. Proceedings, vol 1, pp I – 637 – I – 640
Voros S, Haber GP, Menudet JF, Long JA, Cinquin P (2010) Держатель для робота ViKY: первоначальный клинический опыт и предварительные результаты с использованием отслеживания инструментов. IEEE / ASME Trans Mechatron 15 (6): 879–886
Google ученый
 org/ScholarlyArticle»> 255.
org/ScholarlyArticle»> 255.Voros S, Hager GD (2008) На пути к обнаружению взаимодействия инструмента и ткани в режиме реального времени при роботизированной лапароскопии. В: BioRob 2008. 2-я Международная конференция IEEE РАН и EMBS по биомедицинской робототехнике и биомехатронике, 2008 г., стр. 562–567
Voros S, Long JA, Cinquin P (2007) Автоматическое обнаружение инструментов на лапароскопических изображениях: первый шаг к высокому уровню управления роботизированными эндоскопическими держателями. Int J Robot Res 26 (11–12): 1173–1190
Статья Google ученый
Ван П., Кришнан С.М., Кугин С., Тьоа М.П. (2001) Классификация эндоскопических изображений на основе текстуры и нейронной сети. В: Материалы 23-й ежегодной международной конференции IEEE Engineering in Medicine and Biology Society, 2001, том 4, стр. 3691–3695
3691–3695
Wang X, Zhang O, Han Q, Yang R, Carswell M, Seales B, Sutton E (2010) Эндоскопическое отображение текстур видео на предварительно созданных трехмерных анатомических объектах без отслеживания камеры. IEEE Trans Med Imaging 29 (6): 1213–1223
Статья Google ученый
Wang Y, Tavanapong W, Wong J, Oh J, de Groen P (2010) Обнаружение качественной визуализации добавочных отверстий с использованием функций профиля поперечного сечения локальных краев и обнаружения близких к паузе.IEEE Trans Biomed Eng 57 (3): 685–695
Статья Google ученый
Ван И, Таванапонг В. , Вонг Дж, О Дж, де Гроен П. (2013) Обнаружение ретрофлексии в почти реальном времени в колоноскопии. Журнал IEEE по биомедицинской и медицинской информатике 17 (1): 143–152
Статья Google ученый
Wang Y, Tavanapong W, Wong J, Oh JH, de Groen PC (2015) Polyp-Alert: обратная связь почти в реальном времени во время колоноскопии.Comput Methods Prog Biomed 120 (3): 164–179
Статья Google ученый
Weede O, Dittrich F, Worn H, Jensen B, Knoll A, Wilhelm D, Kranzfelder M, Schneider A, Feussner H (2012) Анализ рабочего процесса и распознавание хирургической фазы в малоинвазивной хирургии. В: Международная конференция IEEE по робототехнике и биомиметике (ROBIO), 2012 г., стр. 1080–1074
 org/ScholarlyArticle»> 263.
org/ScholarlyArticle»> 263.Wei GQ, Arbter K, Hirzinger G (1997) Визуальное сервоуправление в реальном времени для лапароскопической хирургии.Управление движением робота с помощью сегментации цветного изображения. IEEE Eng Med Biol Mag, IEEE 16 (1): 40–45
Статья Google ученый
Wengert C, Reeff M, Cattin P, Székely G (2006) Полностью автоматическая калибровка эндоскопов для интраоперационного использования. В: Bildverarbeitung für die Medizin 2006, Informatik aktuell, стр. 419–423. Springer
Wieringa FP, Bouma H, Eendebak PT, van Basten JPA, Beerlage HP, Smits GA, Bos JE (2014) Улучшенное восприятие глубины с помощью дополнительного трехмерного дисплея и трехмерных панорамных обзоров, созданных компьютером в роботе -ассистированная лапароскопия. J Med Изображение 15001: 1
J Med Изображение 15001: 1
Google ученый
Винтер С., Рупп С., Элтер М., Мюнзенмайер С., Герхаузер Х., Виттенберг Т. (2006) Автоматическое адаптивное улучшение изображений, полученных с помощью фиброскопических эндоскопов. IEEE Trans Biomed Eng 53 (10): 2035–2046
Статья Google ученый
Wolf R, Duchateau J, Cinquin P, Voros S (2011) Трехмерное отслеживание лапароскопических инструментов с использованием статистического и геометрического моделирования.В: Вычисление медицинских изображений и компьютерное вмешательство — MICCAI 2011, no. 6891 в LNCS, стр. 203–210. Springer

Wong WK, Yang B, Liu C, Poignet P (2013) Подход на основе квазисферического треугольника для эффективного трехмерного отслеживания движения мягких тканей. IEEE / ASME Trans Mechatron 18 (5): 1472–1484
Статья Google ученый
Ву К., Нарасимхан С.Г., Джарамаз Б. (2010) Структура множественного изображения на основе шейдинга для перспективных эндоскопов с близким освещением.Int J Comput Vis 86 (2–3): 211–228
MathSciNet Статья Google ученый
Wu C, Tai X (2009) Применение функции изменения цвета в поиске гастроскопических изображений. В: Шестая международная конференция по нечетким системам и открытию знаний, 2009. FSKD ’09, vol 3, pp 388–392
 org/ScholarlyArticle»> 271.
org/ScholarlyArticle»> 271.Xia S, Ge D, Mo W, Zhang Z (2005) A Content- Система поиска эндоскопических изображений на основе. В: 27-я Ежегодная международная конференция общества инженеров в медицине и биологии, 2005 г., IEEE-EMBS 2005.pp 1720–1723
Xia S, Mo W, Yan Y, Chen X (2003) Эндоскопическая система поиска изображений, основанная на методе цветовой кластеризации. В: Третий международный симпозиум по обработке мультиспектральных изображений и распознаванию образов, том 5286, стр. 410–413
Ямагути Т., Накамото М., Сато Й, Кониси К., Хашизуме М., Сугано Н., Йошикава Х, Тамура С. ( 2004 г.) Разработка модели камеры и процедуры калибровки для эндоскопов с косым обзором. Компьютерная хирургия: официальный журнал Международного общества компьютерной хирургии 9 (5): 203–214
Google ученый
 org/ScholarlyArticle»> 274.
org/ScholarlyArticle»> 274.Yao R, Wu Y, Yang W, Lin X, Chen S, Zhang S (2010) Обнаружение зеркального отражения на гастроскопических изображениях. В: 4-я Международная конференция, 2010 г. по биоинформатике и биомедицинской инженерии (iCBBE), стр. 1–4
Ип М., Лоу Д., Салкудин С., Ролинг Р., Нгуан С. (2012) Отслеживание и регистрация тканей для хирургии под визуальным контролем. IEEE Trans Med Imaging 31 (11): 2169–2182
Статья Google ученый
Zappella L, Béjar B, Hager G, Vidal R (2013) Классификация хирургических жестов на основе видео и кинематических данных.Med Image Anal 17 (7): 732–745
Статья Google ученый
 org/ScholarlyArticle»> 277.
org/ScholarlyArticle»> 277.Zhang C, Helferty JP, McLennan G, Higgins WE (2000) Коррекция нелинейных искажений в эндоскопических видеоизображениях. В кн .: Известия. 2000 Международная конференция по обработке изображений, 2000, том 2, стр. 439–442
Чжан Х, Пайандех С. (2002) Применение визуального отслеживания для роботизированной лапароскопической хирургии. J Robot Syst 19 (7): 315–328
MATH Статья Google ученый
Zheng MM, Krishnan SM, Tjoa MP (2005) Основанная на слиянии поддержка клинических решений для диагностики заболеваний по эндоскопическим изображениям. Comput Biol Med 35 (3): 259–274
Статья Google ученый
VideoGIE
VideoGIE
Снижение ошибок за счет постобработки видео с беспроводного капсульного эндоскопа | Журнал EURASIP по обработке изображений и видео
Мы рассматриваем два сценария: (I) одиночные пиксельные ошибки, появляющиеся с высокой плотностью из-за плохого приема. (II) Блоки ошибок из-за перебоев в канале, когда значимые части кадра отсутствуют.
(II) Блоки ошибок из-за перебоев в канале, когда значимые части кадра отсутствуют.
Сценарий i: пространственное окрашивание
Недостатком модуляции PPM является то, что она может вносить большие ошибки декодирования, называемые аномальными ошибками , если качество канала ухудшается по сравнению с оптимальной рабочей точкой (любые два символа могут быть заменены с равной вероятностью) [ 19, стр. 627]. Однако в изображениях аномальные ошибки будут близки к шуму соль и перец , который можно эффективно уменьшить известными методами пространственной окраски, использующими внутрикадровую корреляцию.
Несжатые кадры
Мы применяем медианную фильтрацию (MF) [20], которая может справиться с плотностью шума соли и перца до 50% [21, с.200]. Медианный фильтр проходит по всему изображению, заменяя каждый пиксель медианой значений пикселей в определенной окрестности соответствующего пикселя [20]. Мы рассматриваем квадратичную ( n x n ) окрестность пикселей для вычисления медианы здесь.
На рисунке 2 показано исходное изображение, то же изображение, искаженное ошибками соответствующей имитационной модели, и версии, отфильтрованные по медианным значениям с использованием блоков пикселей 4 × 4 и 5 × 5.Реконструкция неплохая, что подтверждают и значения SSIM: 0,93 для блоков 4 × 4 и 0,96 для блоков 5 × 5. Эти значения соответствуют среднему значению SSIM, указанному в Разделе 4.2.1.
Рис.2a Исходное изображение WCE. b Изображение WCE с большими ошибками при моделировании UWB PPM. SSIM = 0,05 c Исправленное изображение: медианный фильтр 4 × 4. SSIM = 0,93. d Исправленное изображение: медианный фильтр 5 × 5. SSIM = 0,96
Сжатые кадры
Для сжатых кадров в область сжатия будет добавлен шум, напоминающий соль и перец.По мере того, как изображение распаковывается, будут возникать искажения.
На рис. 4a показана реконструкция сжатой версии DPCM на рис. 2a. Алгоритм [4] вносит в кадры определенные артефакты. Поскольку около 96% исходных данных было удалено, алгоритм неплох (обратите внимание также, что этот алгоритм был разработан для изображений колоноскопии HD). Однако большая часть этих артефактов, вероятно, возникает из-за того, что доступные видеопотоки для WCE уже сжаты (при увеличении изображения наблюдаются артефакты блокировки, которые соответствуют расположению артефактов, связанных с DPCM).Это отражено в SSIM между исходным и сжатым кадром, который составляет около 0,8-0,85. Для сравнения, тот же алгоритм обеспечивает SSIM около 0,9–0,95 для изображений колоноскопии HD. Это означает, что соответствующий алгоритм сжатия не имеет хорошего представителя для исходного сжатого изображения WCE. Поэтому в этом случае трудно получить справедливый субъективный тест.
Поскольку около 96% исходных данных было удалено, алгоритм неплох (обратите внимание также, что этот алгоритм был разработан для изображений колоноскопии HD). Однако большая часть этих артефактов, вероятно, возникает из-за того, что доступные видеопотоки для WCE уже сжаты (при увеличении изображения наблюдаются артефакты блокировки, которые соответствуют расположению артефактов, связанных с DPCM).Это отражено в SSIM между исходным и сжатым кадром, который составляет около 0,8-0,85. Для сравнения, тот же алгоритм обеспечивает SSIM около 0,9–0,95 для изображений колоноскопии HD. Это означает, что соответствующий алгоритм сжатия не имеет хорошего представителя для исходного сжатого изображения WCE. Поэтому в этом случае трудно получить справедливый субъективный тест.
Поскольку декодер DPCM является рекурсивным фильтром [4], ошибки будут иметь «хвосты» в каждом измерении изображения, что приведет к появлению артефактов в виде углов, показанных на рис.4b. Как показано в [11], когда плотность ошибок мала, их можно полностью скрыть, сначала используя детектор углов в распакованном изображении, такой как детектор Харриса [22], затем вернитесь в область сжатия и вставьте один из соседних пикселей в соответствующем (поврежденном) месте пикселя.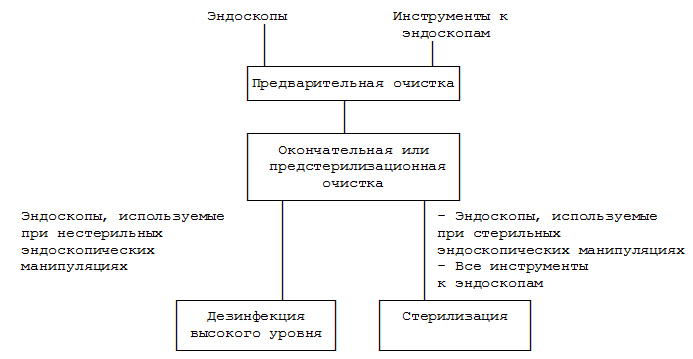 С многочисленными ошибками, как на рис. 4b, этот метод в основном не работает, как показано на рис. 4c. Медианный фильтр также не сработает, поскольку он сглаживает сжатое изображение, что приводит к серьезным ошибкам декомпрессии.
С многочисленными ошибками, как на рис. 4b, этот метод в основном не работает, как показано на рис. 4c. Медианный фильтр также не сработает, поскольку он сглаживает сжатое изображение, что приводит к серьезным ошибкам декомпрессии.
Способ справиться с высокой плотностью ошибок — это общих вариаций (TV) inpainting [23] в области сжатия, поскольку там шум близок к шуму соли и перца. На рисунке 3 изображен наш подход к пространственной окраске сжатых кадров. Как предложено в [21, стр. 201–202], отображение ТВ может уменьшить такие ошибки без сглаживания других частей изображения следующим образом: с Ом c , область сжатого изображения и D c область рисования (набор зашумленных пикселей, указанный в (2)), пусть v 0 обозначает сжатое зашумленное изображение на Ω c .{2} \ mathrm {d} \ mathbf {x}, $$
(1)
Рис.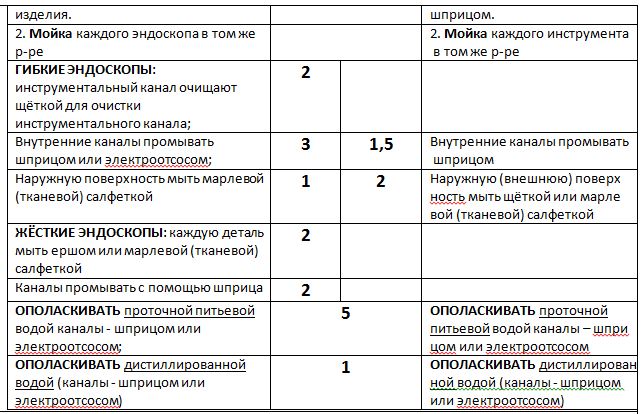 3
3 Блок-схема для пространственного закрашивания одиночных ошибок пикселей в сжатых кадрах
Рис. 4a Распакованное изображение WCE. SSIM w.r.t. оригинал на рис. 2а = 0,8. b Распакованное изображение с ошибками. SSIM = 0,75 c Исправлено с обнаружением углов. SSIM = 0,76. d Исправлено с помощью TV inpainting (область сжатия) и определения углов.SSIM = 0,86
, где λ управляет степенью снижения шума в v 0 вне области рисования D c , что определяется выражением
$$ D_ {c} = \ {\ mathbf {x} | v_ {0} (\ mathbf {x}) \ geq C_ {1} \ vee v_ {0} (\ mathbf {x}) \ leq C_ {2} \}. $
(2)
Для шума соли и перца C 1 = max ( v 0 ) и C 2 = min ( v 0 ).Так как шум, возникающий в результате модуляции PPM, не совсем совпадает с шумом соли и перца, мы устанавливаем C 1 = max ( v 0 ) — ε 1 и C 2 = min ( v 0 ) + ε 2 , где ε 1 и ε 2 определены для соответствующего набора изображений. ε 1 и ε 2 не могут быть выбраны достаточно большими, чтобы все зашумленные пиксели содержались в пределах D c без введения размытия в сжатый кадр.Это будет наиболее проблематично на очень светлых или темных участках изображения. Алгоритм «обнаружения капли» (например, «разница гауссианов») [24] может применяться для определения того, какие наборы пикселей имеют самые светлые и самые темные значения, тогда можно настроить ε 1 и ε 2 От этого. Поскольку выходные данные кодера DPCM имеют распределение, подобное Лапласу, этот метод работает довольно хорошо, как мы увидим в Разделе 4.2.2, где приведены другие примеры. Поскольку ошибки, находящиеся за пределами D c , малы, и все размытие, вносимое в сжатый кадр, приводит к плохой реконструкции, в уравнении следует выбрать большое значение λ .(1). Можно получить дальнейшее улучшение качества с помощью алгоритма в [11], описанного выше, после ввода ТВ.
ε 1 и ε 2 не могут быть выбраны достаточно большими, чтобы все зашумленные пиксели содержались в пределах D c без введения размытия в сжатый кадр.Это будет наиболее проблематично на очень светлых или темных участках изображения. Алгоритм «обнаружения капли» (например, «разница гауссианов») [24] может применяться для определения того, какие наборы пикселей имеют самые светлые и самые темные значения, тогда можно настроить ε 1 и ε 2 От этого. Поскольку выходные данные кодера DPCM имеют распределение, подобное Лапласу, этот метод работает довольно хорошо, как мы увидим в Разделе 4.2.2, где приведены другие примеры. Поскольку ошибки, находящиеся за пределами D c , малы, и все размытие, вносимое в сжатый кадр, приводит к плохой реконструкции, в уравнении следует выбрать большое значение λ .(1). Можно получить дальнейшее улучшение качества с помощью алгоритма в [11], описанного выше, после ввода ТВ. То есть обнаружением углов восстановленного изображения с последующей корректировкой пикселей в области сжатия.
То есть обнаружением углов восстановленного изображения с последующей корректировкой пикселей в области сжатия.
Результат показан на рис. 4d. Хотя большинство выступающих углов удалено, а грубые детали изображения улучшены, все еще есть некоторые ложные артефакты из-за небольших ошибок, находящихся за пределами D c в уравнении.(2). Эти ложные артефакты, вероятно, являются причиной того, что SSIM не превышает 0,87. Мы предоставим более подробный анализ SSIM для этого метода рисования в Разделе 4.2.2.
Сценарий ii: временная окраска
Предлагаемый здесь метод одинаков для сжатых и несжатых кадров. Считаем несжатые кадры.
Если значительная часть кадра отсутствует, то большие ошибки рисования неизбежны при пространственном окрашивании, поскольку область рисования становится слишком широкой [25].Мы используем межкадровую корреляцию в стратегии с временным наложением , чтобы справиться с этой ситуацией: если соседние кадры достаточно близки по содержанию, то недостающие области могут быть вставлены из одного из них. Преимущество этого подхода состоит в том, что возможная злокачественная ткань, которая может стать невидимой из-за блока ошибки, станет видимой в исправленном кадре, поскольку информация будет вставлена из соседнего кадра. То есть информация о злокачественных тканях не теряется, и не следует вносить ложных артефактов.
Предложенная схема изображена на рис. 5. Первые поврежденные части кадра обнаруживаются с помощью детектора Харриса. Из-за движения капсулы одни и те же объекты редко будут располагаться с одинаковыми координатами и перспективой на экране в разных кадрах. Чтобы выровнять два изображения так, чтобы их общие элементы располагались в одном наборе координат, можно использовать преобразование гомографии \ (\ mathcal {H} \). То есть пиксельные координаты (прошлых или будущих) кадров I n +1 или I n −1 , обозначенных x , деформируются в координаты изображения I n как \ (\ tilde {\ mathbf {x}} = \ mathcal {H} \ mathbf {x} \). Прошлые кадры часто могут покрывать всю область рисования за счет некоторого размытия, поскольку WCE часто приближается к фоновой сцене по мере прохождения через пищеварительную систему. Будущие кадры могут не покрывать всю область рисования, но могут быть сделаны такими же резкими, как исходный кадр. Ниже мы приводим примеры с использованием прошлых кадров.
Прошлые кадры часто могут покрывать всю область рисования за счет некоторого размытия, поскольку WCE часто приближается к фоновой сцене по мере прохождения через пищеварительную систему. Будущие кадры могут не покрывать всю область рисования, но могут быть сделаны такими же резкими, как исходный кадр. Ниже мы приводим примеры с использованием прошлых кадров.
Блок-схема для предлагаемой временной схемы рисования для блоков ошибок
\ (\ mathcal {H} \) должен быть оценен по соответствующим кадрам.Есть два основных способа сделать это: (I) прямой (на основе пикселей) метод , который описан в [26]. (II) Оцените общие черты с помощью алгоритма масштабно-инвариантного преобразования признаков (SIFT) [27], затем выберите наилучшие совпадения ( вставок ) и найдите наилучшее соответствие \ (\ mathcal {H} \), используя случайную выборку. алгоритм консенсуса (RANSAC) [28]. Я, вероятно, наименее сложный метод. Однако здесь мы используем метод II, так как он может определить точное \ (\ mathcal {H} \) даже из небольших перекрывающихся областей двух изображений [26, с. 15–33]. Это означает, что \ (\ mathcal {H} \) можно найти, даже если из-за сбоя отсутствуют большие части кадра.
15–33]. Это означает, что \ (\ mathcal {H} \) можно найти, даже если из-за сбоя отсутствуют большие части кадра.
Мы применили реализацию MATLAB для SIFT, а также другие вспомогательные функции из библиотеки VLFeat [29] для выполнения вычислений. Поскольку некоторые артефакты из-за сжатия и шума могут быть ошибочно приняты за функции, важно, чтобы алгоритм SIFT отдавал предпочтение более крупным функциям. Поэтому мы устанавливаем большой «WindowSize» (дисперсия окна Гаусса), то есть 4 единиц пространственных интервалов [29] (остальные параметры были установлены по умолчанию).Затем были найдены хорошие совпадения, как показано на рис.6.
Рис. 6Оценка \ (\ mathcal {H} \) для сильно поврежденного кадра. Верхний: Соответствие функциям SIFT. Нижний: вставки после RANSAC
Из-за разницы в яркости между исходным изображением и окрашенной частью могут появиться края (см. Рис. 7c). Их можно удалить с помощью редактирования Пуассона [30]: с Ω , область изображения и D область рисования с границей ∂ D , пусть u 0 обозначает доступную информацию об изображении на Ω — D и \ (\ vec {v} \) — некоторое «направляющее» векторное поле на D . {2} \ mathrm {d} \ mathbf {x}, \ \ u_ {| \ partial D} = u_ {0 | \ partial D}. $
{2} \ mathrm {d} \ mathbf {x}, \ \ u_ {| \ partial D} = u_ {0 | \ partial D}. $
(3)
Рис. 7Исправление ошибочных блоков. a Исходное изображение WCE. b Изображение WCE с блоками ошибок в каналах Y , U и V . SSIM = 0.55 c Исправленное изображение с использованием \ (\ mathcal {H} \). SSIM = 0.91 d Исправленное изображение с использованием \ (\ mathcal {H} \) и редактирования Пуассона. SSIM = 0,93
Последнее условие обеспечивает непрерывность за границей D .Теперь пусть \ (f_ {D} = \ {I_ {n-1} (\ tilde {\ mathbf {x}}) | \ tilde {\ mathbf {x}} = \ mathcal {H} \ mathbf {x} \ in D \} \), то есть часть внутри D , которая отображается из соседнего изображения. Затем мы можем установить \ (\ vec {v} = \ nabla f_ {D} \).
На рис. 7 показано исходное изображение, изображение с большими блоками ошибок в каналах Y , U и V , а также восстановленное изображение. Мы оценили гомографию по каналу Y, как показано на рис. 6. SSIM для зашумленного изображения составляет около 0.55, тогда как у исправленного изображения SSIM = 0,93. Для сравнения, применяя (пространственное) отображение ТВ в том же зашумленном кадре, получается значение SSIM 0,83. Эти значения соответствуют среднему значению SSIM, представленному в разделе 4.2.
Мы оценили гомографию по каналу Y, как показано на рис. 6. SSIM для зашумленного изображения составляет около 0.55, тогда как у исправленного изображения SSIM = 0,93. Для сравнения, применяя (пространственное) отображение ТВ в том же зашумленном кадре, получается значение SSIM 0,83. Эти значения соответствуют среднему значению SSIM, представленному в разделе 4.2.
Можно также применить каналы цветности, U или V (из преобразования RGB в YUV на рис. 1), чтобы оценить \ (\ mathcal {H} \), если кадр из канала яркости Y уничтожен. Это дает дополнительную защиту от шума.Однако, поскольку энергия в U или V значительно ниже, точность \ (\ mathcal {H} \) может быть меньше, чем у канала Y .
Важно отметить, что \ (\ mathcal {H} \) может компенсировать только движение WCE или жесткое движение в целом. Если на заднем плане есть движения из-за мышечных сокращений и т. Д., Восстановленный кадр будет искажен. Можно использовать оптический поток [31], вычисленный из соседних кадров, чтобы компенсировать такие движения, или методы, разработанные в так называемой нежесткой структуре на основе алгоритмов движения [32]. Тем не менее, будет трудно получить стабильные преобразования между изображениями, если корреляция (то есть сходство содержимого изображения) будет слишком низкой, что будет иметь место, когда WCE претерпевает быстрые движения. Однако вполне вероятно, что будущие WCE будут иметь более высокую частоту кадров, что в целом улучшит работу вышеуказанного алгоритма.
Тем не менее, будет трудно получить стабильные преобразования между изображениями, если корреляция (то есть сходство содержимого изображения) будет слишком низкой, что будет иметь место, когда WCE претерпевает быстрые движения. Однако вполне вероятно, что будущие WCE будут иметь более высокую частоту кадров, что в целом улучшит работу вышеуказанного алгоритма.
Возникновение одиночных ошибок пикселей и блоков ошибок одновременно
Однопиксельные ошибки и блоки ошибок могут возникать в одном и том же изображении. Есть два подхода к этой проблеме: (i) сначала обработайте одиночные пиксельные ошибки и (ii) сначала удалите ошибочные блоки.
Эксперименты ясно показали, что подход (i) был единственным действующим вариантом: хотя SIFT, за которым следует RANSAC, очень устойчив к шуму на изображениях (поскольку они выделяются как выбросы через RANSAC), мы попадаем в затруднения, когда пытаемся решить область изображения, которая должна заменить блоки ошибок. Это связано с тем, что детектор углов / линий сбивает с толку из-за солевых и перцовых характеристик одиночных ошибок пикселей.
Результат подхода i) показан на рис. 8. Можно заметить, что комбинированный алгоритм способен справиться с обоими сценариями одновременно.SSIM примерно такой же, как и для изолированной ошибки блока, рассмотренной в предыдущем разделе. Это означает, что наш подход достаточно надежен.
Рис. 8Одновременное исправление ошибок отдельных пикселей и блоков ошибок. a Исходное изображение 1. b Исходное изображение 2. c Шумное изображение 1, SSIM = 0,005. d Шумное изображение 2, SSIM = 0,02 e Исправленное изображение 1, SSIM = 0,91 f Исправленное изображение 2, SSIM = 0,89
Для сжатых кадров можно удалить все углы изображения, используя метод, показанный на рис.3, затем удалите блочные ошибки в распакованном изображении. Тогда можно будет избежать того, чтобы декодер DPCM привнес новый набор ложных артефактов из-за небольшого несоответствия между исходным и временно окрашенным изображением.
Эндоскопическое оборудование для практикующего ветеринара
Джули Каллахан Кларк, DVM, дипломат ACVIM
Эндоскопия — это минимально инвазивная процедура, которая позволяет исследователю заглянуть внутрь органа или полости тела и получить диагностическую информацию, которая включает в себя грубую оценку интересующей области и получение ткани для гистопатологической оценки.
В то время как эндоскопия желудочно-кишечного тракта (ЖКТ) представляет собой наиболее распространенное применение в ветеринарии, эндоскопы могут использоваться для исследования различных систем организма ( таблица ). Кроме того, эндоскопия может быть терапевтической, если используется для извлечения инородного тела, удаления камня или установки зонда для кормления.
| ГИБКАЯ ЭНДОСКОПИЯ | ЖЕСТКАЯ ЭНДОСКОПИЯ |
| Бронхоскопия Колоноскопия Эзофагоскопия Гастродуоденоскопия Уретроцистоскопия кобелей Назофарингоскопия Трахеоскопия | Артроскопия Женская уретроцистоскопия Лапароскопия Отоскопия Риноскопия Торакоскопия |
По мере того, как стандарты обслуживания в ветеринарии улучшаются с развитием технологий, клиенты ожидают более высокого уровня ухода и даже ищут малоинвазивные процедуры для своих питомцев. Эндоскопия — это универсальный инструмент, который предоставляет нехирургический вариант диагностики и лечения различных заболеваний.
Эндоскопия — это универсальный инструмент, который предоставляет нехирургический вариант диагностики и лечения различных заболеваний.
Для того, чтобы стать опытным эндоскопистом, требуется обширная подготовка, это навык, который можно выучить со временем, и в конечном итоге он станет ценным компонентом вашей практики. В этой статье представлен общий обзор эндоскопического оборудования, инструментов и обращения с ними для практикующих врачей, заинтересованных во внедрении программы эндоскопии.
Решение о покупке эндоскопического оборудования начинается с внутренней оценки вашей клиентской базы и потребностей их домашних животных:
- Какие процедуры вы собираетесь выполнять и на каких видах животных?
- Как часто вы ощущаете потребность в эндоскопии?
- Могут ли ваши клиенты позволить себе дополнительные расходы на такую процедуру?
Приобретение эндоскопа — серьезное обязательство как с финансовой точки зрения, так и с точки зрения обучения. Поэтому правильная покупка является обязательным условием реализации успешной программы. К счастью, доступно как новое, так и бывшее в употреблении оборудование, которое может удовлетворить самые разные потребности.
Поэтому правильная покупка является обязательным условием реализации успешной программы. К счастью, доступно как новое, так и бывшее в употреблении оборудование, которое может удовлетворить самые разные потребности.
Универсальный осциллограф — такой, который позволяет пользователю выполнять ряд процедур — идеален и наиболее экономичен. Другие соображения включают:
- Тип прицела
- Производитель
- Размер
- Характеристики
- Ценообразование.
Рассмотрение перед покупкой
Перед покупкой эндоскопического оборудования поговорите с представителями службы поддержки различных производителей, чтобы определить, какая компания предлагает лучшую систему для конкретных потребностей вашей практики.Ключевые темы для обсуждения:
- Стоимость
- Вспомогательные услуги / обучение
- Гарантия
- Доступность арендуемого оборудования (если вам потребуется обслуживание).
Производители широко используемого эндоскопического оборудования:
- Fujinon : fujifilmusa. com
- MDS Inc: mdsvet.com
- Olympus : olympusamerica.com
- Pentax : pentaxmedical.com
- Сторц : karlstorz.com
 com
comБазовый эндоскоп ( Рисунок 1 ) состоит из:
Трубка для введения — Включает механизм передачи изображения:
- Жгуты оптоволоконного стекла (фиброскоп) или микросхема устройства с зарядовой связью (ПЗС) (видеоэндоскоп)
- Канал для биопсии / аспирации
- Ирригационный / инсуффляционный канал
- Тросы управления прогибом
Наконечник —включает:
- Ручки регулировки отклонения
- Дополнительный вход канала
- Орошение / инсуффляция
- Всасывающие клапаны
Пуповина — отвечает за светопропускание
Рисунок 1.Базовый эндоскоп со стрелками, указывающими на 3 основных компонента: вводную трубку, наконечник и пуповину
Существует 2 основных типа гибких эндоскопов: фиброскоп ( рисунки 2 и 3 ) и видеоэндоскоп. Ключевым отличительным признаком является механизм, с помощью которого изображение воспринимается и передается для просмотра. Гибкие эндоскопы используются преимущественно для навигации по сложной анатомии желудочно-кишечного тракта.
Ключевым отличительным признаком является механизм, с помощью которого изображение воспринимается и передается для просмотра. Гибкие эндоскопы используются преимущественно для навигации по сложной анатомии желудочно-кишечного тракта.
Рис. 2. Storz (karlstorz.com) Гибкий фиброскоп 7,5-Fr
Рис. 3. Гибкий фиброскоп Pentax (pentaxmedical.com) с камерой CCD, прикрепленной к окуляру
Фиброскоп Технология
Для просмотра изображение передается от линзы на конце эндоскопа через пучки волоконно-оптических волокон к линзе у окуляра.
Другое оборудование
К окуляру может быть прикреплена видеокамера CCD, которая передает изображение на видеомонитор.При покупке фиброскопа настоятельно рекомендуется добавить камеру CCD — она (1) позволяет людям, кроме оператора, активно участвовать в процедуре и (2) позволяет записывать и сохранять изображения и видео для документирования медицинских карт.
Преимущества
Основными преимуществами фиброскопов являются низкая стоимость и повышенная портативность.
Ограничения
К недостаткам можно отнести низкое качество изображения и возможное повреждение отдельных волокон, что приводит к появлению черных пятен, закрывающих поле зрения.
Технологии
Для просмотра изображение передается с ПЗС-чипа, расположенного в дистальном конце эндоскопа, на видеомонитор через процессор. В зависимости от производителя процессор может быть отдельным элементом оборудования или встроен в блок источника света.
Преимущества
Качество изображения видеоэндоскопа намного превосходит качество изображения фиброскопа и, следовательно, требует более высокой стоимости.Отсутствие волоконно-оптических пучков (и разорванных волокон) гарантирует, что изображение не будет содержать черных точек.
Жесткий эндоскоп ( Рисунки 4 и 5 ), также известный как телескоп, используется преимущественно для оценки нетубулярных структур, таких как полость тела или суставная щель. Телескоп позволяет направлять свет в интересующую область. Он содержит стеклянные линзы и оптоволокно, но не содержит гибких материалов.
Телескоп позволяет направлять свет в интересующую область. Он содержит стеклянные линзы и оптоволокно, но не содержит гибких материалов.
Рис. 4. Жесткий телескоп Storz 1,9 мм с операционным тубусом
Рисунок 5.Оперативный телескоп Storz
Гибкие эндоскопы- Диаметр : Диаметр вставных трубок составляет от <1 мм до 14 мм. Большинство эндоскопов диаметром> 2 мм имеют дополнительный канал и отклоняемый наконечник, что является желательным качеством при выполнении эндоскопии ЖКТ.
- Длина : длина эндоскопа составляет от 55 см до 170 см. При дуоденоскопии и колоноскопии у собак крупных пород часто требуются более длинные прицелы (> 125 см).
- Гастроскопы — превосходные эндоскопы для большинства практик, поскольку они универсальны, имеют 4-стороннее отклонение наконечника и функциональные вспомогательные каналы.
- Гастроскоп <9 мм и длиной не менее 100–125 см может использоваться для обычных процедур у большинства собак и кошек.
- Гастроскопы большего диаметра (> 7,8 мм) нельзя использовать для бронхоскопии, риноскопии и уретроцистоскопии у кошек или маленьких собак.
- Практикам, которые регулярно выполняют такие процедуры, следует рассмотреть второй меньший объем, например 5.Эндоскоп от 4 мм до 6 мм.
- Гастроскоп <9 мм и длиной не менее 100–125 см может использоваться для обычных процедур у большинства собак и кошек.

- Диаметр и длина : При выборе размера телескопа выберите максимально возможный диаметр, чтобы максимизировать светопропускание и поле зрения. Диаметр внешнего телескопа составляет от 1,9 мм до 10 мм, а длина — от 10 см до 35 см.
- Угол обзора : Углы обзора варьируются от 0 ° до 120 °, хотя углы более 30 ° редко используются в ветеринарии.Телескоп прямого обзора (0 °) легче всего маневрировать, но обеспечивает более ограниченный обзор по сравнению с углом обзора от 25 ° до 30 °.
- Тубус / канюля : телескопы обычно используются вместе с тубусом или канюлей. Операционная оболочка обеспечивает канал для диагностических или хирургических инструментов, облегчает попадание / выход газа или жидкости и защищает прицел.
- Жесткий эндоскоп 2,7 мм — это обычный универсальный телескоп для практикующих ветеринарных врачей, который можно использовать для уретроцистоскопии (у женщин), антеградной риноскопии и отоскопии.В операционном тубусе можно разместить гибкий инструмент 5-Fr, такой как щипцы для биопсии.
- Полужесткие телескопы доступны в очень маленьком диаметре (1 мм) для оценки небольших просветов (например, уретры мужской кошки). К сожалению, они имеют пониженное оптическое качество и используются редко.
- Телескопы большего размера необходимы для оценки полости тела и всегда используются в сочетании с троакаром и канюлей.
 Операционная оболочка обеспечивает канал для диагностических или хирургических инструментов, облегчает попадание / выход газа или жидкости и защищает прицел.
Операционная оболочка обеспечивает канал для диагностических или хирургических инструментов, облегчает попадание / выход газа или жидкости и защищает прицел. Использование телескопов для малоинвазивной хирургии выходит за рамки данной статьи.Для получения дополнительной информации по этой теме прочтите «Передний край: введение в уменьшенную портовую лапароскопическую хирургию» в выпуске журнала «Сегодняшняя ветеринарная практика» за январь / февраль 2012 г. , доступном на сайте todaysveterinarypractice.com.
, доступном на сайте todaysveterinarypractice.com.
Важным компонентом базовой системы эндоскопа является источник света ( Рис. 6 ), который необходим для адекватного освещения исследуемой области.
Рис. 6. Источник света Pentax
- Передающий кабель соединяет источник света с эндоскопом.
- Ксеноновые источники света превосходят галогенные и рекомендуются для видеоэндоскопии.
- Требуется лампа мощностью от 100 до 300 Вт, которая потенциально может гореть от 400 до 1000 часов.
- Запасная лампа должна быть в наличии всегда.
Большинство источников света имеют встроенный воздушный насос для инсуффляции — вдувания газа, например, двуокиси углерода, в полость тела — и ирригации.
- Инсуффляция необходима для эндоскопии желудочно-кишечного тракта, чтобы поддерживать открытый просвет для осмотра и навигации.
- Орошение достигается, когда положительное давление выталкивает жидкость (дистиллированную или деминерализованную воду) через вводную трубку, позволяя пользователю очистить линзу и / или поле обзора для оптимальной визуализации.

Эти функции контролируются клапанами на наконечнике. Важно отметить, что для жесткой эндоскопии рекомендуется использовать инсуффлятор с диоксидом углерода, поскольку он обеспечивает лучший контроль скорости потока и давления воздуха. Это также снижает риск воздушной эмболии при инсуффляции живота, мочевого пузыря или суставной щели.
При использовании телескопа ирригация осуществляется за счет силы тяжести с помощью мешка для жидкости, подвешенного над пациентом.
Гибкая эндоскопическая система, включающая подставку для оборудования, плоские мониторы, гибкий блок для хранения инструментов и настенные отсасывающие устройства.
Всасывание Помимо ирригации и инсуффляции, отсасывание — третья важная особенность эндоскопа. Достаточное всасывание удаляет:
Достаточное всасывание удаляет:
- Жидкость или мусор, которые могут закрывать поле обзора
- Воздух закапывается (1) в конце процедуры или (2) если дыхательная система пациента нарушена из-за чрезмерного растяжения во время процедуры.
Для большинства процедур должно хватить любого стандартного всасывающего насоса; всасывающий шланг соединяет насос с пуповиной.
Монитор Видеоэндоскопыпередают изображение через процессор на монитор. Если вы выберете жесткий эндоскоп или фиброскоп, вам также понадобится система видеокамер для проецирования изображения.
- Базовая система включает эндоскопический адаптер / головку камеры (подключается к окуляру жестких эндоскопов и фиброскопов), блок управления камерой и монитор.
- Существует 2 типа камер : однокристальные (CCD) и трехчиповые (3 CCD) камеры. Камеры с тремя микросхемами предпочтительнее из-за их более высокого разрешения и улучшенной цветопередачи.
- Существует множество форматов аналогового видео сигналов , которые различаются по качеству изображения:
- Формат с наименьшей детализацией / наименьшей стоимостью — это составной формат или формат BNC.
- Качество увеличивается с форматами Y / C (или S video) и RGB.
- Формат RGB рекомендуется для использования с 3 камерами CCD.
- Камеры с цифровым выходом обычно используют последовательный цифровой интерфейс (SDI), который может передавать несжатые цифровые видеосигналы, оптимизированные для отображения на плоских экранах или цифровой записи.
- Одним из самых высоких стандартов является цифровой видеоинтерфейс (DVI), который обычно используется для видеокамер высокого разрешения (HD).
- Для Full HD формат 1080p считается золотым стандартом.
- Для обеспечения оптимального изображения монитор должен соответствовать или превосходить горизонтальное разрешение видеокамеры (разрешение 500 строк для CCD против 750 строк для 3 камер CCD).
/CYW-201-640x500.jpg)

Операционные телескопы и гибкие эндоскопы позволяют разместить гибкие инструменты (, рис. 7, ) через дополнительный канал. Доступны как многоразовые, так и одноразовые инструменты.
Рис. 7. Обычно используемые гибкие инструменты (слева направо): биопсийные щипцы с гладкой чашечкой, петлевые ловушки, щипцы с раздвоенными челюстями, щипцы для хищников и щипцы из кожи аллигатора
- К наиболее часто используемым инструментам относятся щипцы для биопсии и щипцы для извлечения инородных тел.
- В зависимости от потребностей вашей практики доступны различные инструменты, в том числе щетки для цитологии, корзины для извлечения камней, иглы для инъекций / аспирации и коагулирующие электроды.
Для защиты дополнительного канала:
- Избегайте пропускания инструмента через отклоненный наконечник.
- Никогда не применяйте силу к инструменту, когда встречается сопротивление.
- Убедитесь, что диаметр инструмента не превышает диаметра канала, прежде чем вставлять инструменты.

предназначены для удержания в левой руке оператора ( Рисунок 8 ).
Рис. 8. Изображение манипулятора с эндоскопом
- Используйте указательный палец левой руки для управления всасывающим клапаном и средний палец для управления клапаном инсуффляции / ирригации.
- Клапан нагнетания срабатывает, если вы положите палец на клапан, не нажимая на него; ирригация инициируется при нажатии клапана.
- Если возможно, используйте большой палец для управления ручками отклонения. Людям с меньшими руками может потребоваться правая рука для управления внешней ручкой.
- Большая внутренняя ручка отклоняет прицел вверх и вниз.
- Внешняя меньшая ручка отклоняется влево и вправо.
- В идеале операторы контролируют вводную трубку около рта пациента с помощью правой руки .

Навыки навигации и манипуляции с трубкой для введения лучше всего приобретаются с повторением и практикой.Для обучения предпочтительны двухдневные курсы, включающие лекционные часы и опыт влажной лаборатории.
В зависимости от потребностей вашей практики доступен широкий выбор эндоскопического оборудования. Приобретение универсального эндоскопа, прохождение соответствующего обучения и обучение ваших клиентов являются ключом к успешной реализации программы эндоскопии.
УХОД ЗА ЭНДОСКОПОМ
Следование инструкциям производителя по безопасной и надлежащей очистке — лучший способ ухода за эндоскопом.
До и после каждой процедуры выполняйте испытание на герметичность, чтобы проверить наличие внутренних утечек. Это испытание проводится с помощью манометра, прикрепленного к пуповине. Раннее обнаружение утечки до погружения части прицела в воду или ферментный очиститель может предотвратить дорогостоящие повреждения.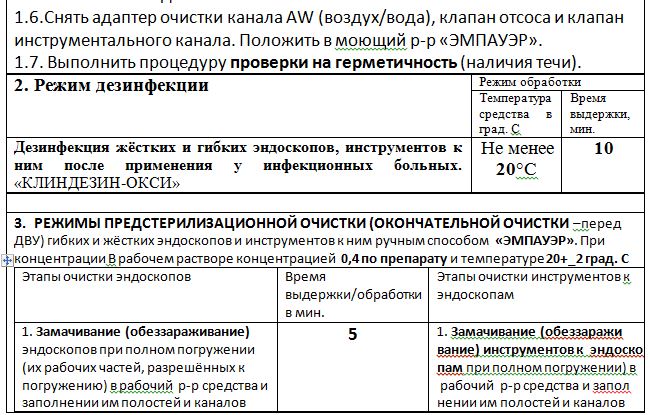
После каждой процедуры:
- Протрите прицел мягкой тканью, чтобы удалить остатки органических материалов.
- Промойте дополнительный канал ферментным очистителем; Рекомендуются неабразивные чистящие средства с нейтральным pH (Enzol, aspjj.com; EZ-Zyme, miltex.com; MetriZyme, metrex.com).
- Промойте дополнительный канал деминерализованной водой; затем высушите воздухом (впрыскивая через большой шприц с люэровским замком).
Этот подход «быстрой очистки» подходит между процедурами желудочно-кишечного тракта, потому что стерильность не имеет решающего значения, если не существует повышенного риска инфекционных заболеваний. Однако эндоскопы, используемые для респираторных и мочевыделительных процедур, должны быть стерильными, что обеспечивается:
- Холодная дезинфекция с использованием раствора глутаральдегида (Cidex, aspjj. com; MetriCide, metrex.com)
- Газовая стерилизация .
 com; MetriCide, metrex.com)
com; MetriCide, metrex.com)После холодной дезинфекции тщательно промойте эндоскоп в стерильной воде и просушите стерильными полотенцами.
Выполните комплексную очистку после процедуры, если необходимо, или в конце дня:
- Погрузите осциллограф в разбавленную ванну с ферментным очистителем на 10–15 минут, в течение которых канал можно промыть и очистить щетками для очистки каналов.
- Промойте осциллограф деминерализованной водой.
- Повесьте прицел, чтобы он высох.
- Храните гибкий прицел, повесив их; жесткие прицелы лучше всего хранить в защитных футлярах после того, как они полностью просушены.
CCD = устройство с зарядовой связью; FOV = поле зрения; GI = желудочно-кишечный
Рекомендуемая литература- Чамнесс CJ. Эндоскопический инструментарий и документация для гибкой и жесткой эндоскопии. In Tams TR, Rawlings CA (eds): Small Animal Endoscopy , 3-е изд. Сент-Луис: Мосби, 2011, стр. 3–26.
- Denovo RC. Выбор желудочно-кишечного эндоскопа. В Бонагуре (ред.): Текущая ветеринарная терапия Кирка , 12-е изд. Филадельфия: Сондерс, 1995, стр. 664-668.
- Matz ME, Twedt DC. Эндоскопические процедуры для оценки состояния желудочно-кишечного тракта. В Ettinger SJ, Feldman EC (eds): Учебник внутренней ветеринарной медицины , 7-е изд. Филадельфия: Сондерс, 2010, стр. 443-446.
- Tams TR. Эндоскопия желудочно-кишечного тракта: инструменты, техника обращения, обучение и внедрение на практике. In Tams TR, Rawlings CA (eds): Small Animal Endoscopy, 3-е изд. Сент-Луис: Мосби, 2011, стр. 27-40.
- Ван Лю SJ, Ван Лю AP. Оборудование и инструменты в ветеринарной эндоскопии. Vet Clin North Am Small Anim Pract 2009; 39: 817-837.
 In Tams TR, Rawlings CA (eds): Small Animal Endoscopy , 3-е изд. Сент-Луис: Мосби, 2011, стр. 3–26.
In Tams TR, Rawlings CA (eds): Small Animal Endoscopy , 3-е изд. Сент-Луис: Мосби, 2011, стр. 3–26.Уход за эндоскопическими инструментами | Инфекционный контроль сегодня
Эндоскопические устройства постоянно развиваются.Врачи, медсестры и обслуживающий персонал должны быть знакомы с использованием и рекомендациями по уходу и техническому обслуживанию всех эндоскопов и принадлежностей. Многие дорогостоящие ремонтные работы могут быть значительно сокращены или исключены, если потребовать участия в комплексных программах без отрыва от производства для всего персонала, участвующего в работе с эндоскопами и их повторной обработке.
Эта статья не заменяет инструкции по эксплуатации и техническому обслуживанию. Тем не менее, он представляет собой общее руководство по обращению и профилактическому обслуживанию всех жестких и полужестких эндоскопов и принадлежностей.Руководство производителя по эксплуатации и техническому обслуживанию должно быть легко доступно для подробного ознакомления с продуктом и быстрого ознакомления.
В жестких эндоскопах последовательность оптических линз передает просматриваемое изображение в глаза пользователя или на видеомонитор. Этот набор линз состоит из точно выровненных стеклянных линз и разделителей (, рис. 1 ). Способность видеть изображение облегчается за счет передачи света через световой шнур и источника питания через световоды, распределенные вокруг линзы.Бестендоскопическое изображение обеспечивает оптика с жесткими стержневыми линзами.
Оптический элемент для жестких эндоскопических систем обычно называют ателескопом. Телескоп также является самой дорогой и хрупкой частью системы. Несоблюдение правил обращения с ним приведет к дорогостоящему и длительному ремонту. Телескоп — неотъемлемая часть системы, обеспечивающая как изображение, так и свет через две отдельные системы.
Несоблюдение правил обращения с ним приведет к дорогостоящему и длительному ремонту. Телескоп — неотъемлемая часть системы, обеспечивающая как изображение, так и свет через две отдельные системы.
Новые технологии привели к созданию жестких эндоскопов малого диаметра.По мере уменьшения диаметра хрупкость может увеличиваться из-за растрескивания или смещения меньших стеклянных стержней. Жесткие эндоскопы менее чувствительны к изгибу или сгибанию, чем полужесткие или гибкие эндоскопы.
Уход за телескопами и обращение с ними
Регулярно проверяйте все участки поверхности жесткого эндоскопа на наличие царапин, вмятин, следов ожогов или других неровностей. Проверку четкости изображения можно выполнить, удерживая кончик эндоскопа примерно в трех дюймах над белой поверхностью без бликов.Постепенно перемещайте кончик эндоскопа ближе к отпечатанной поверхности, пока он не окажется на расстоянии примерно четверти дюйма. Изображение должно быть четким и ясным, с минимальными искажениями. Если изображение обесцвечено или расплывчато, это может быть связано с неправильной очисткой, наличием дезинфицирующего средства, треснувшей или сломанной линзой, наличием внутренней влаги или внешним повреждением.
Если изображение обесцвечено или расплывчато, это может быть связано с неправильной очисткой, наличием дезинфицирующего средства, треснувшей или сломанной линзой, наличием внутренней влаги или внешним повреждением.
Осмотрите оптические волокна, окружающие цепочку линз на конце эндоскопа, направляя световой столб к яркому свету. Черные точки и затененные участки могут указывать на сломанные, поврежденные или грязные волокна и могут вызвать потерю света.Направление наконечника прицела на яркий свет и наблюдение за световым столбом могут дать ту же информацию.
Системы доставки
Для использования с эндоскопами доступны различные многоразовые и одноразовые оболочки и канюли в различных конфигурациях. Они обеспечивают доступ к полостям тела и органам, а также позволяют проводить ирригацию, вздутие живота, дренирование и введение дополнительных принадлежностей. При использовании любой системы доставки следует соблюдать следующие меры предосторожности:
- Осмотрите кончики многоразовых интродьюсеров и канюль перед введением, чтобы избежать непреднамеренного травмирования пациента.
- Перед введением эндоскопа убедитесь, что в канале нет крови и мусора.
- Помните о возможных электрохирургических опасностях, которые могут возникнуть в результате поиска радиочастотным током альтернативных путей к заземлению через конструкции за пределами области обзора эндоскопа.
- Снимите запорные краны и клапаны на многоразовых оболочках для очистки, дезинфекции и стерилизации.
Мосты и адаптеры
Мосты и адаптеры соединяют телескоп с тубусом и канюлей и позволяют вводить аксессуары (с отклонением или без него) и применять электрохирургическую энергию для резекции или коагуляции ткани.Примеры включают рабочий элемент резектоскопа, порты для аксессуаров или колпачок редуктора или рукав, используемые при лапароскопических процедурах.
По конструкции валы мостов и других жестких принадлежностей изготовлены из тонких металлических труб из-за ограничений по размеру. Их можно легко помять или погнуть, и с ними следует обращаться осторожно. Помятые инструменты не будут правильно собраны.
Принадлежности
Принадлежности могут быть многоразовыми или одноразовыми и могут различаться по размеру, конфигурации и предполагаемому использованию.Примеры включают проводники, биопсийные и захватывающие щипцы, корзины для камней, ножницы, катетеры или стенты и электроды. Многоразовые аксессуары следует тщательно проверять на работоспособность и целостность до и после каждого использования. (Изоляция должна быть неповрежденной на всех электрических компонентах.) Производители не несут юридической ответственности, если предмет с пометкой «одноразовый» или «только одноразовый» используется повторно и затем неисправен. Соблюдайте инструкции на этикетках всех производителей.
Очистка, дезинфекция и стерилизация эндоскопических инструментов
Лапароскопические ручные инструменты представляют собой самую большую проблему для персонала операционной сегодня.Эти инструменты чрезвычайно трудно чистить из-за длинного вала и зажима в сборе, который может захватывать мусор. Положительное давление вдыхаемого живота, кровь и другие биологические жидкости текут в эти каналы, и их может быть трудно или невозможно удалить. Многие из этих инструментов невозможно разобрать для облегчения ручной очистки, а системы ультразвуковой очистки могут быть противопоказаны из-за мелких суставов и челюстей.
Эти инструменты следует часто протирать, чтобы удалить видимые загрязнения, и их следует погружать в ферментный очищающий раствор сразу после процедуры для начала процедуры дезактивации.Каналы следует обильно промыть, а челюсти энергично почистить щеткой.
Первым и наиболее важным этапом обработки является тщательная очистка для удаления грубых загрязнений, в том числе микроорганизмов (биологическая нагрузка), что позволяет дезинфицирующим или стерилизующим агентам работать эффективно. Органические материалы могут инактивировать эти агенты или создавать барьер, препятствующий проникновению дезинфицирующих средств на все поверхности инструмента. Ручная очистка — самый безопасный метод использования жестких и однопросветных гибких эндоскопов и принадлежностей.Ультразвуковые моечные машины могут повредить и ослабить мелкие суставы и удалить адгезивы и смазки. Механические моечные машины / дезинфекторы, разработанные для гибких эндоскопов, обычно создают слишком высокое давление для небольших просветов, характерных для гибких эндоскопов, используемых в урологии и гинекологии.
При ручной очистке инструментов следует обращаться к стандарту OSHA по патогенам, передающимся через кровь, 1992 года. Необходимо использовать соответствующие средства индивидуальной защиты (СИЗ). Это включает в себя непроницаемый халат или фартук, прочные перчатки и защиту для глаз, чтобы избежать брызг от щеток для просвета.Необходимо очистить как внешнюю, так и внутреннюю (просвет) поверхности эндоскопических инструментов. Соответствующие инструкции по очистке см. В руководстве производителя эндоскопа.
Ручные очистители должны быть оценены на предмет их способности удалять органические загрязнения. Моющие средства для мытья посуды и очистители кожи не рекомендуются, так как они не могут эффективно удалять органические загрязнения и фактически могут оставлять остатки на инструментах, которые могут препятствовать процессу последующей дезинфекции или стерилизации Ферментные моющие средства — отличный выбор для очистки эндоскопических инструментов.Ферменты, используемые в этих детергентах, относятся к белку, сахару или жиру. Выберите ферментное моющее средство, эффективное для материалов и растворов, воздействию которых подвергается инструмент. См. Инструкции по применению на этикетке производителя, в том числе температуру воды, используемой для приготовления моющего средства. Если инструмент не очищен должным образом, его нельзя стерилизовать или дезинфицировать.
Стерилизация
Пар — наиболее распространенный и наименее дорогой метод стерилизации.Однако многие эндоскопические инструменты с линзами нельзя стерилизовать паром. Даже инструменты и телескопы, продаваемые как «автоклавируемые», прослужат дольше, если их обработать альтернативными методами.
Газообразный оксид этилена был стандартом для стерилизации термочувствительных предметов, включая эндоскопы. Циклы стерилизации обычно составляют от полутора до двух часов при температуре 55 ° C. Затем предметы должны подвергаться механической вентиляции в течение восьми — 12 часов. Окись этилена (ЭО) постепенно заменяется в некоторых больницах другими методами стерилизации, такими как пар, парофазные методы и парауксусная кислота из-за соображений стоимости и безопасности.Тем не менее, следует проявлять осторожность перед устранением ЭО, поскольку некоторые из альтернатив имеют значительные ограничения обработки и проблемы совместимости материалов, включая размер камеры (которая может быть стерилизована) или недостаточный срок хранения устройств (своевременная стерилизация). Система Steris (Steris, Mentor, Огайо) использует перуксусную кислоту в запатентованном жидкостном процессоре для стерилизации предметов менее чем за 30 минут при температуре 50-55 ° C. Этот метод является своевременным, и его стерильность не может быть сохранена при длительном хранении.
Плазма и / или паровая фаза — еще один метод стерилизации эндоскопических инструментов. Sterrad (Advanced Sterilization Processes of Irvine, CA) одобрен FDA для использования в США. Уточняйте у компании ограничения по утвержденным размерам просвета.
Дезинфекция
Если стерилизация невозможна, рекомендуется дезинфекция высокого уровня для предметов ухода за больными, которые контактируют со слизистыми оболочками. Дезинфицирующие средства высокого уровня — это спороцидные, бактерицидные, вирулицидные и фунгицидные средства, которые удаляют большую часть бионагрузки, за исключением некоторых спор.FDA регулирует заявления на этикетке, поскольку они относятся к использованию продукта для дезинфекции медицинских инструментов, особенно времени, необходимого для уничтожения определенных организмов.
Коммерческие препараты глутаральдегида доступны как в щелочных, так и в кислых формах. Хотя слабокислые препараты кажутся безопасными для эндоскопических инструментов, щелочные препараты более распространены. Растворы доступны в концентрациях 2,4% или 3,5%. Концентрации 2,4% без поверхностно-активных веществ — рекомендуемые растворы для эндоскопических инструментов.Поверхностно-активные вещества служат смачивающими агентами для снижения поверхностного натяжения и позволяют дезинфицирующему раствору проникать в области, недоступные для воды. Тем не менее, поверхностно-активные вещества могут оставлять электропроводящий осадок, который трудно отмывать, и могут препятствовать свободному перемещению мелких суставов.
Чрезвычайно важно удалить все следы дезинфицирующего средства путем промывки инструментов. Глутаральдегид очень едкий для кожи и слизистых оболочек и может способствовать химическим ожогам. Производители глутаральдегида в настоящее время рекомендуют три отдельных стерильных полоскания продолжительностью не менее одной минуты каждое.Промывочная вода не подлежит повторному использованию. Пожалуйста, обратитесь к вкладышам в упаковке с глутаральдегидом для получения конкретных инструкций по использованию, повторному использованию, промывке и утилизации.
Более подробную информацию о глутаровом альдегиде можно получить у производителей во вкладышах к их продуктам. Обращайте особое внимание на этикетки на всех продуктах, чтобы снизить вероятность повреждения инструментов и травм ваших пациентов и вас самих. Убедитесь, что чистящие средства совместимы с дезинфицирующим или стерилизующим средством.Избегайте использования сильнощелочных или сильнокислых чистящих средств, так как они могут повредить инструменты.
Заключение
Многоразовые эндоскопические инструменты можно безопасно и эффективно обрабатывать при условии их очистки, стерилизации или дезинфекции в соответствии с рекомендациями производителя. Все процессы очистки, дезинфекции и стерилизации должны быть стандартизированы и контролироваться для обеспечения качества процесса. Информацию о совместимости и использовании см. В письменных инструкциях производителей приборов и химикатов.Установите конкретные политики и процедуры для обеспечения надлежащего обращения и стандартизированных практик.
Ключевые моменты, касающиеся профилактического ухода и обслуживания эндоскопических инструментов:
- Не допускайте высыхания инструментов перед очисткой. Если невозможно очистить немедленно, погрузите инструменты в дистиллированную воду. Ферментное моющее средство следует добавлять в соответствии с письменными инструкциями производителя по применению.
- Большинство эндоскопических инструментов необходимо очищать вручную.Не используйте ультразвуковые или другие механические устройства, если этот способ специально не указан в соответствующих инструкциях по эксплуатации или руководству по эксплуатации и техническому обслуживанию. Эти процессы могут повредить клей, удалить смазку, поцарапать или вмятины на поверхности.
- Только обученный персонал должен обращаться с эндоскопическими инструментами.
- Не штабелируйте инструменты во время очистки, дезинфекции, стерилизации или хранения.
- Не сгибайте и не роняйте инструменты.
- Смотайте свободно все кабели, включая те, которые подключены к камерам и источникам питания.
- Уменьшите интенсивность источников света до низкой и дайте им остыть перед выключением питания. Это продлит жизнь лампочкам.
- Некоторые гибкие эндоскопы имеют вентиляционные механизмы для стерилизации и / или дезинфекции. Строго следуйте письменным инструкциям производителя, чтобы избежать дорогостоящего и частого ремонта.
- Не используйте повторно или не обрабатывайте устройства с пометкой «одноразового использования».»
Эйлин Янг, штат Род-Айленд, клинический специалист-гинеколог в CirconCorporation в Стэмфорде, штат Коннектикут.
Полный список ссылок см. На веб-странице: www.infectioncontroltoday.com
Чтобы просмотреть полный список ссылок, щелкните здесь
(PDF) Система обработки изображений в реальном времени для эндоскопических приложений
Операция обнаружения границ выполняется отдельно для матриц интенсивности
R, G и B. Выходные данные
трех операций суммируются для получения
композит.Этот метод представляет собой эффективный компромисс
между выполнением истинного обнаружения края
RGB с использованием 3-мерных векторов и
, выполняющим границу уровня серого. После того, как края были обнаружены
, применяется морфологическая операция для
утолщения краев. Структурирующий элемент в форме диска
используется для расширения изображения на краю изображения. Целью
шага расширения является соединение непересекающихся
ребер, которые находятся близко друг к другу.Рис. 3 (a) показывает сумму
ребер R, G и B. Рис. 3 (b) показывает результат процедуры дилатации
.
Рис. 3. (а) Изображение края. (б) Краевое изображение после дилатации.
Сегмент изображения определяется после расширения. Каждая
смежных областей белых пикселей, как показано на рис. 3 (b)
, считается сегментом изображения.
черных пикселей считаются частью фона, а
не считаются частью какого-либо сегмента изображения.Это верно
, даже если область черных пикселей
частично или полностью окружена белыми пикселями.
3.3 Идентификация полипов
Сегменты изображения анализируются, чтобы определить, являются ли
полипами. Это задача классификации объектов
, которая требует, чтобы характеристики каждого сегмента изображения
были извлечены и сравнены с критериями, определенными
на основе априорного знания характеристик полипа.
Каждый сегмент изображения классифицируется как полип или
не полип. Один из подходов — сначала получить полный набор функций
для каждого сегмента изображения. Однако более эффективно
извлекать столько функций, сколько требуется
. Признаки извлекаются из изображения
сегментов один за другим и последовательно сравниваются с
ожидаемыми характеристиками полипа. Если какой-либо признак
сегмент не соответствует ожидаемому от полипа
, сегмент исключается из рассмотрения
и больше признаков не получается.
Первым признаком, извлеченным из каждого сегмента изображения
, является площадь сегмента. Площадь определяется как
пикселей, составляющих сегмент, а не
как количество пикселей, заключенных в сегменте. Это определение площади
используется, так как намного проще подсчитать
количество пикселей в сегменте, чем вывести его геометрическую форму
и вычислить истинную площадь.Любые
сегментов, которые ниже указанного порога,
немедленно отклоняются как потенциальные полипы. Этот порог
можно указать в фактических пикселях или
в процентах от общего размера изображения.
Затем выводится цвет сегмента. Наименьший прямоугольник
, который может охватывать сегмент, равен
, определенному для достижения приблизительного местоположения, и
геометрического размера сегмента.Затем этот прямоугольник
используется для определения области исходного цветного изображения
, занятой сегментом изображения. Цвет сегмента
, характеризующийся средней интенсивностью пикселей в этой области
. Оттенок сегмента не учитывается, поскольку
цель состоит в том, чтобы отличить светлые полипоподобные объекты
от темных полостей тела. Отверстия в стенке ткани
создают резкие градиенты, но легко различимы
как области темных пикселей.Сегменты со средней интенсивностью
темнее, чем заданный порог,
исключаются из дальнейшего рассмотрения.
Следующий объект, который нужно выделить, — это форма объекта
. Поскольку полипы обычно имеют эллиптическую форму, ожидаемая форма каждого объекта
будет формой эллипса. Определение
параметров эллипса произвольного объекта
включает использование методов распознавания формы
.Одним из популярных методов, используемых для обнаружения
примитивных геометрических фигур, таких как линии, окружности и
эллипсов, является преобразование Хафа. Впервые предложенное в
1962, преобразование Хафа преобразует изображение из пространственной области
в пространство параметров, где формы
могут быть проанализированы как точки. Однако преобразование Хафа
не подходит для использования в реальном времени.
